





While underwater robotics solutions are becoming more and more impressive as the years go by, machines used for delicate activities like collecting samples of marine life or conducting underwater archaeology still sport clunky robotic hands that lack the necessary soft touch. A research team from the Harvard School of Engineering and Applied Sciences has been working to tackle the issue, designing, building and testing a soft gripper solution.
According to Harvard researcher Robert J. Wood, the clunky robotic hands used for collecting fragile objects like coral samples were originally designed for the oil and gas industry, to carry out tasks like underwater construction and maintaining pipelines. That makes them significantly overpowered for tasks such as deep-sea specimen collection, causing them to routinely damage target objects.
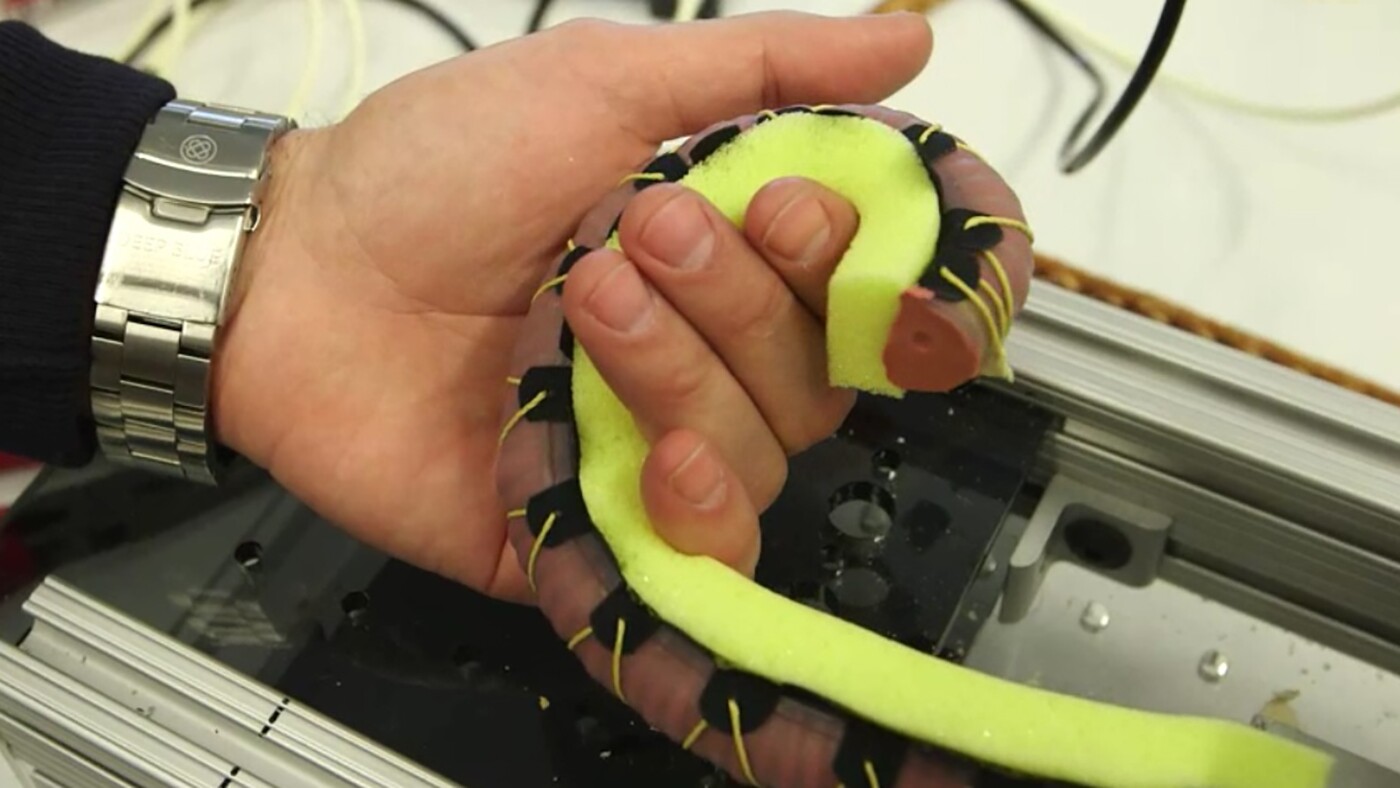
Determined to improve the situation, the team designed two types of soft robotic gripper, each capable of manipulating objects of different shapes and sizes. The first is inspired by the coiling action of boa constrictors, while the other features opposing pairs of bellows-style bending actuators.

In order to make the grippers easy to modify and repair in the field, the team placed an emphasis on keeping the construction simple, using inexpensive materials, and opting for a modular design. This also allowed them to rapidly try out multiple different setups, quickly determining which designs worked best.
There were some big challenges to overcome during development, most notably a lack of any precise specifications to build to. In order to ensure that the grippers would be able to manipulate objects of different sizes and shapes, the team tested them in a tank, picking up and manipulating an assortment of vegetables.
Once the tank experiments were complete, the researchers moved on to more serious testing, using their creations on remotely operated vehicles (ROVs) during an expedition to the Gulf of Eilat in the north of the Red Sea, in May 2015. More than a dozen dives were conducted, with the new grippers used to collect objects dropped by the team to depths of up to 170 m (558 ft). Samples of fauna were also successfully collected by the grippers.
While testing has been positive, the grippers' ability to delicately select samples isn't the end of the story. Further down the line, the team hopes to integrate technology into the hands to allow for analysis to be conducted on the seabed, gathering data such as organism size and gene expression, all without the need to remove them from their natural habitat.
The researchers also have several engineering improvements in mind. For example, there's talk of integrating haptic feedback to allow operators to effectively feel what the grippers are touching. While current testing has focused on using a single gripper, the possibility of using two together is being investigated, with the potential to further increase the abilities of the robotic tools.
The team is also far from satisfied with the testing that's been carried out so far, with the grippers used no deeper than 200 m (656 ft). As the project continues, the researchers would like to provide the equipment with some real challenges, working in unexplored environments at depths of up to 6,000 m (19,685 ft).
The research is published in the journal Soft Robotics.


