



Scientists at Florida Atlantic University have employed a novel thermal training technique to give robotic fingers a natural look and feel. With the ability to curve and straighten as it is heated and cooled, the researchers are hopeful their lifelike new creation will be put to use in underwater robotics and eventually, advanced prosthetic devices.
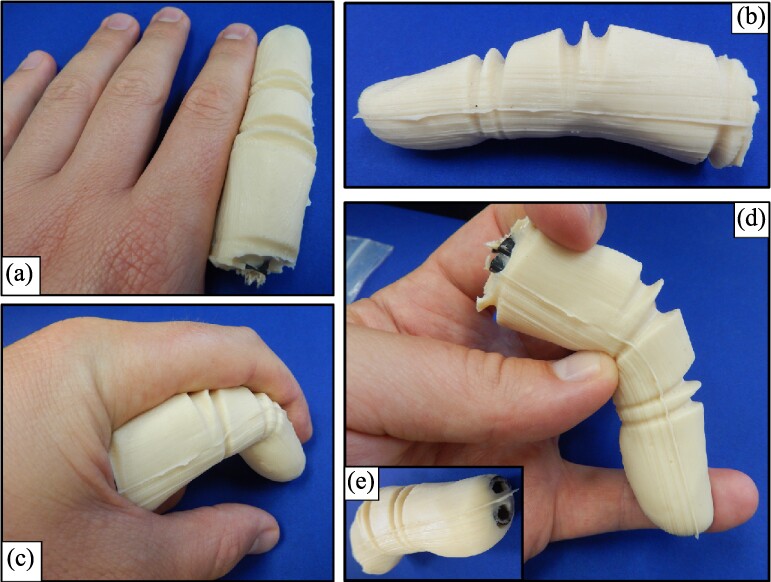
The researchers began with a 3D CAD model of a human finger. From this, they created a model of the digit and then 3D printed inner and outer molds, between which they placed a flexor and extensor actuator made from shape memory allow (SMA), along with a position sensor.
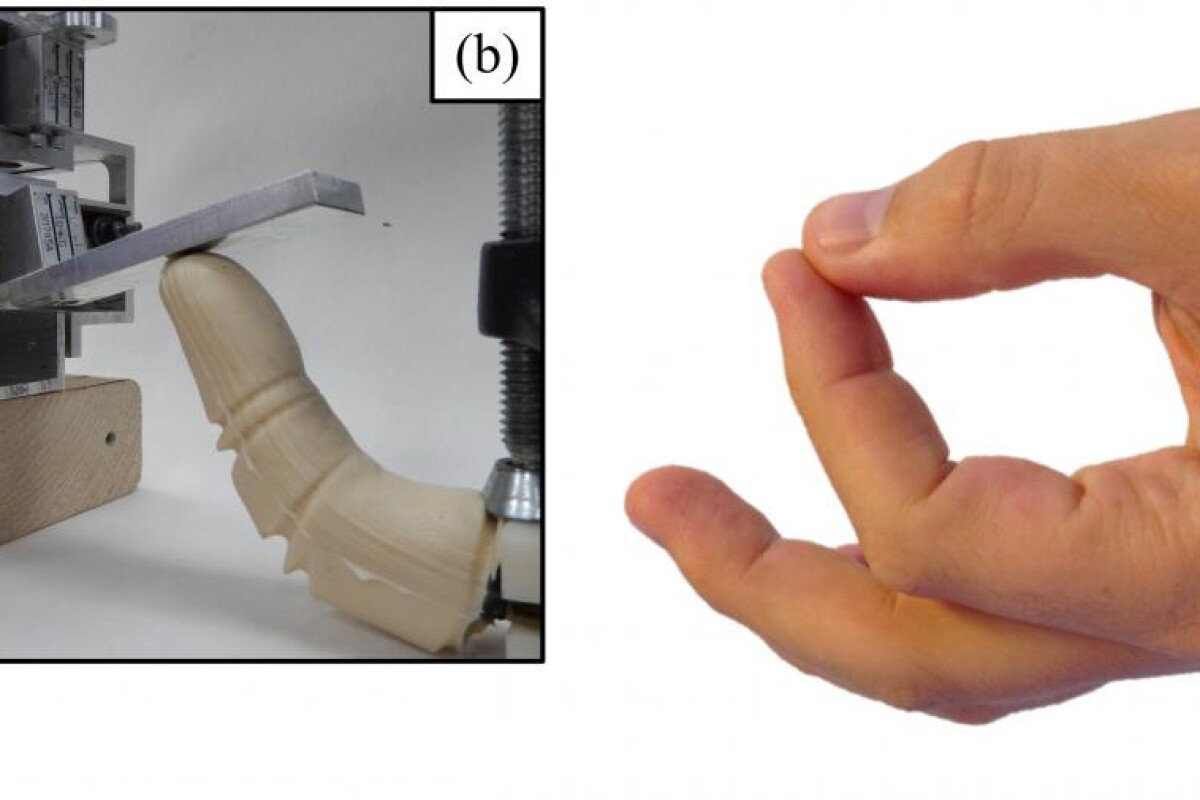
The flexor actuator was trained to take the shape of a bent human finger when heated, while the extensor was trained to straighten out when heated. So by alternately heating and cooling the two actuators, the finger in could be made to bend and straighten. This was done through a process called Joule heating, which sees electrical currents pass through a heat-generating conductor.
One problem the researchers encountered was the time it takes for each actuator to cool again and resume its natural shape after being heated. Because of this, they are looking to undersea robotics as the finger's first port of call. In an underwater environment, thermal insulators fitted to the tip of the finger can allow water to flow throughout the cavity and more efficiently cool the actuators, which the researchers say greatly improves the operational speed of the device.
Eventually it is hoped that the approach can be used fin the development of better prostheses.
"We have been able to thermomechanically train our robotic finger to mimic the motions of a human finger like flexion and extension," says Erik Engeberg, assistant professor at FAU. "Because of its light weight, dexterity and strength, our robotic design offers tremendous advantages over traditional mechanisms, and could ultimately be adapted for use as a prosthetic device, such as on a prosthetic hand."
The research was published in the journal Bioinspiration & Biomimetics.
You can see a demonstration of the finger, attached to a hand, in the video below.
Source: Florida Atlantic University


