
























































































































“It has a top speed of 6 km/h, it balances itself, and you couldn’t crash it if you tried. How can you possibly see that as one of the biggest thrills of your life?” That was the response from an automotive journalist colleague at the Tokyo Motor Show after I'd eulogized riding Honda’s UNI-CUB β personal mobility device to him.
It’s a typical reaction to the next generation of transport from the people who write solely about the four-wheeled current generation. Indeed, those who are of healthy body, and not elderly, or mobility impaired, usually don't quite fathom the need for more sedate yet practical forms of transport.
The world is facing an energy crisis, a global warming crisis brought on by humanity polluting the atmosphere, severe overcrowding in cities and a host of complex mobility problems, and yet the vast majority of us continue to drive cars weighing several tons with four or more seats as our sole personal transport. Given perspective, this is not the answer.
Personal mobility solutions of the future must be much smaller, use far less energy, and reduce pollution to a minimum.

In the last few years, I’ve tried many non-conventional personal transport solutions – many Segway models and Chinese clones of the revolutionary self-balancing design, the Yikebike, several prototypes of Toyota’s iReal, several prototypes of Toyota’s Winglet, Robstep’s M1, General Motors prototype EN-V self-balancing car plus a variety of one-, two-, three- and four-wheeled mobility solutions and while many have impressed me, none have had quite as much impact as the Honda UNI-CUB β I tried two weeks ago at the Tokyo Motor Show.
Like many of those devices, Honda's UNI-CUB β is self-balancing, but it offers so much more than simply staying upright of its own accord.
The main reason for my fascination with the MINI-CUB is the astonishing ease-of-use thanks to its very advanced user interface which gives using the machine a “degree of difficulty” of zero.
From the moment it moved with my 85 kg weight aboard, I realized the UNI-CUB β nano-EV offered something very close to a direct vehicle-brain-interface, with only “intention” required to move in a certain direction or speed.

Though it deduces its instructions (the rider’s intentions) using a combination of complex but known technologies, it is the refinement of the control software which is the most impressive – it seems to "know" what you want it to do, giving it a telepathic feel, and it obeys your thoughts so smoothly, that confidence is inspired from the first moment. The other factor which made it one of the thrills of a lifetime, is its driving wheel, which is so advanced that it might one day become recognized as the "Wheel V2.0” – Honda’s Omni Traction Drive System.
For those enchanted by ingenious technological solutions (AKA Gizmag's readership of four million human beings per month), the Omni Traction Drive System will be recognized as mechanical artistry at its finest.
The omni-directional wheel consists of many small motor-controlled wheels connected to form one large wheel.

Forward and backward movement is done by rotating the large wheel, and side-to-side movement is achieved by rotating the small wheels. By combining both, the UNI-CUB β can move forward, backward or diagonally, though to the rider, it’s more like thinking "I’ll go that way," and away it goes.
Reflecting on riding Honda’s UNI-CUB β, I recalled the first time I rode a bicycle. It was a moment of absolute joy that I’d looked forward to for quite some time (my first bike was considerably bigger than I was, and reaching the pedals required some growing before it was possible), and one I can still recall with vivid clarity. It was one of life’s finest moments.
Riding the UNI-CUB β was a similarly rewarding experience.
Riding a self-balancing monocycle (it’s not quite but more on that later) is such a challenging concept that you can’t help but be a little afraid that you won’t be able to do it. I’ve ridden or driven pretty much everything on one through four wheels in a third of a century of boys’ toys journalism but despite that, I realized, in hindsight, I was afraid I might not “get it.”
When you do “get it”, you can’t help but be pleased with yourself, even though, by then, you know it’s down there with breathing, walking and chewing gum in being so easy and natural that you really don’t really need to think about it.
Learning to ride the UNI-CUB β is infinitely easier than learning to ride a bicycle. You sit down on it, lift the release lever at the rear of the seat that stabilizes it at standstill, and … away you go.
There’s no balancing involved because it does that for you.
It’s also not like learning to drive a car where you need to master and coordinate a number of skills such as revving the motor and releasing the clutch, coordinating the throttle, clutch, and gearstick for changing gears and so on, because it is auto-everything.
There’s no traditional steering mechanism like handlebars or a steering wheel, and you don’t actually need to consciously think about leaning in a particular direction. Just as you intuitively lean forward when you want a car, bike, PWC, or
That might be how the UNI-CUB β works out what to do, but in reality, it felt as if it was mind-reading my intentions. It’s the nearest thing to a natural machine brain interface I’ve ever encountered – you just think which direction you want to go in and the UNI-CUB does the rest.
I will be very interested to see how this technology works with the aged and mobility-impaired – operating it requires no more strength than being able to sit upright, so it might well turn out to be a killer app for the elderly.
These technologies obviously have application in other personal mobility devices too, and since the experience, I have been envisioning many new compact mobility solutions, from monocycle wheelchairs through to sports machinery.

Those who have watched the development of the UNI-CUB β, will know it has evolved from the original U3-X self-balancing unicycle we first saw at the 2009 Tokyo Motor Show. The U3-X also used the Honda Omni Traction Drive System.
The U3-X and UNI-CUB β were both developed at Honda R&D Corporation’s Fundamental Technology Research Center in Saitama, Japan, the same place which developed Honda’s ASIMO humanoid robot and the company's walking assist devices.
I was a little disappointed when the UNI-CUB was announced, because it has added a second wheel – just as I was incredibly disappointed when GM’s two-wheel, self-balancing EN-V turned into another four-wheel micro car, adding a training wheel to the omni-directional wheel seemed to cheapen the end result just a tad.

I had spent many hours at the 2011 Tokyo Motor Show watching Honda’s demonstration models frolicking on the one-wheeled U3-X.
So I have been looking forward to driving the U3-X, and subsequently the UNI-CUB and UNI-CUB β, for four years ... and when it happened it was an anti-climax because in almost every detail, I knew what to expect. I’d imagined how it felt from watching Honda’s demonstrations.
Though the Segway, Winglet and Robstep accelerate and decelerate in reaction to weight distribution, they are steered with the handlebars. The UNI-CUB β is steered by body movement too, only it does it better and easier. Lean forward it moves forward, lean further forward and speed picks up. Move your weight ever so slightly rearward and it slows, more still and it stops, and even more still and it will begin moving backwards.
This is all done in a very natural way – it isn't "nervous" in any way because the control software smoothes it all out for you, and the sensitivity of the sensors is such that it doesn’t actually require the rider to consciously lean in any direction.
Perhaps the only aspect I hadn’t counted on was a consequence of the omni wheel which can move sideways without the larger wheel rotating at all. I kept wanting to “tip it into a corner” as with a motorcycle, but you can’t really tip the UNI-CUB β into a corner because it stays upright.
So what ended up happening when I moved my weight to the inside was that the UNI-CUB β would feel my input and the Omni Traction Drive would begin spinning sideways, to accommodate my request. I suspect that’s the reason the additional wheel has been added – to simulate the customary experience of pointing in the same direction you are traveling. Just the same, I recall that the models who piloted the U3-X at Tokyo Motor Show in 2011 seemed to have no trouble doing tricks that seemed magical.

One of the models at that show captivated me as she "floated" around the stage like Tinkerbell in Peter Pan.
Most car and motorcycle pilots are more comfortable with oversteer – when you’ve gone in too fast and it starts to let go, the back lets go first. You won’t go anywhere too fast on the UNI-CUB β, but the cornering experience isn’t quite the same as with traditional two- and four-wheelers as it delivers some of the same cues of understeer, even though it’s not actually understeer. If you're going to be "sideways" in a corner, you want to be pointing towards the inside, not the outside of the corner.
When you are going around a corner, the UNI-CUB β is quite happy doing so sideways, but inclined in the opposite direction to that I have grown accustomed to. This is disconcerting if your brain is wired to know that understeer needs immediate input to avoid disaster. Once my head worked it out, things became a lot easier.
Other than that slight variation, it works exactly as advertised, and I can’t for the life of me work out why Honda hasn’t commercialized the device and begun reaping the rewards for having come up with such a brilliant concept as the Omni Traction Wheel and designed it into such a desirable product.

On top of all that, the 2011 Honda display at the Tokyo Motor Show demonstrated a fully-developed product which appeared on the verge of commercialization – a range of colors and patterns and … who knows what happened.
I did not get to ride the U3-X, so I can only surmise that having developed a very good interface, Honda opted to go the extra mile to the sublime near-perfection of the UNI-CUB β’s almost telepathic interface.
Honda has shown over time that it likes to get its first product of a new series just right, and given that there’s not much chance of anyone copying Honda’s omni-directional wheel, this could be a very important product and subsequent series of products because they cannot be replicated anywhere else.
A case in point here is Toyota’s Winglet. I tried the Winglet at Tokyo Motor Show in 2009 and again in 2011 and it was a ready-to-sell product in my opinion.

Although weighing in at one fifth the weight of a Segway, it was not nearly as “nervous” as you would expect for a 10 kg vehicle carrying an 85 kg human.
Toyota waited to put the product on the market and the Winglet that appeared this year has been significantly reengineered from that shown just two years ago.
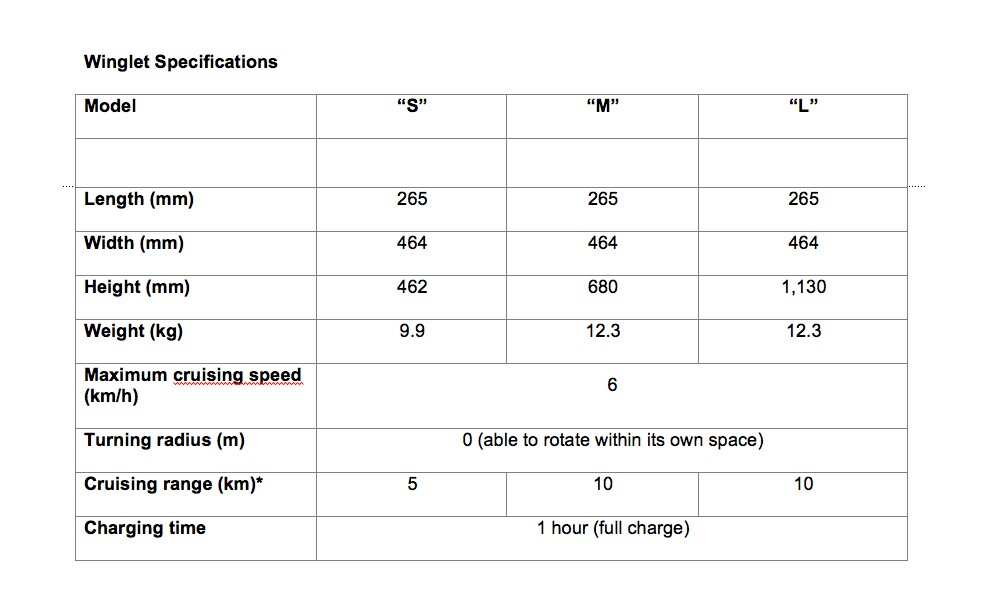
Above are the specs of the Winglet published by Toyota in 2009 and below are the specs of the Winglet displayed on the Toyota stand this year.

By waiting, Toyota enabled a host of similar if not identical products to appear from China, most notably the Robstep M1, but I saw many more in China early this year at Auto Shanghai. During Auto Shanghai I tried nearly all of them, with several rides on the Robstep, and it was equally as good as the Winglets I had ridden in 2009 and 2011 – it’s hard to be certain with several years in between, but they felt remarkably similar in their characteristics, and they looked very similar. So why is Toyota waiting still? It risks the product it invented becoming a me-too product. On the other hand, a better developed product makes a greater impact, and distinguishes it from the competition.
By comparison, the Honda UNI-CUB β is MUCH easier than the Toyota Winglet to master, doesn’t go fast enough to scare even the most timid of pilots, and it will not lose several years of sales as Chinese manufacturers successfully reverse engineer its product.
Apart from the world’s early adopters, who will want a UNI-CUB β for the exact reason that it is an engineering triumph and a first, it’s also a perfect robotic platform (weighing in at around 20 kg but capable of carrying 100 kg), and it will fill a distinct void in the current personal mobility spectrum.
In summary, it works even better than advertised. In the history books 100 years from now, this device might well be elevated to the Pantheon of Personal Transportation devices alongside the Model T Ford.
Bravo Honda.


