







Earlier in the year, Kuka Robotics made a big fuss about its ping-pong playing robot facing up against professional player Timo Boll. Sadly, the promised match turned out to be just an advert and the robot wasn't as capable as had been made out. While Japanese firm Omron has been quick to point out that its new robot ping-pong-player is by no means capable of taking on and beating even a semi-skilled human opponent, it is capable of entering into long rallies with human players.
The robot itself, which Omron tells Gizmag has been in development for about 6 months, stands on three legs, is 2.7 m (8.9 ft) tall and weighs 600 kg (1,323 lb). It has been developed as part of Omron's work on sensing and control technology, with the ultimate goal of building "an enriched society marked by optimal harmonization of people and machines."
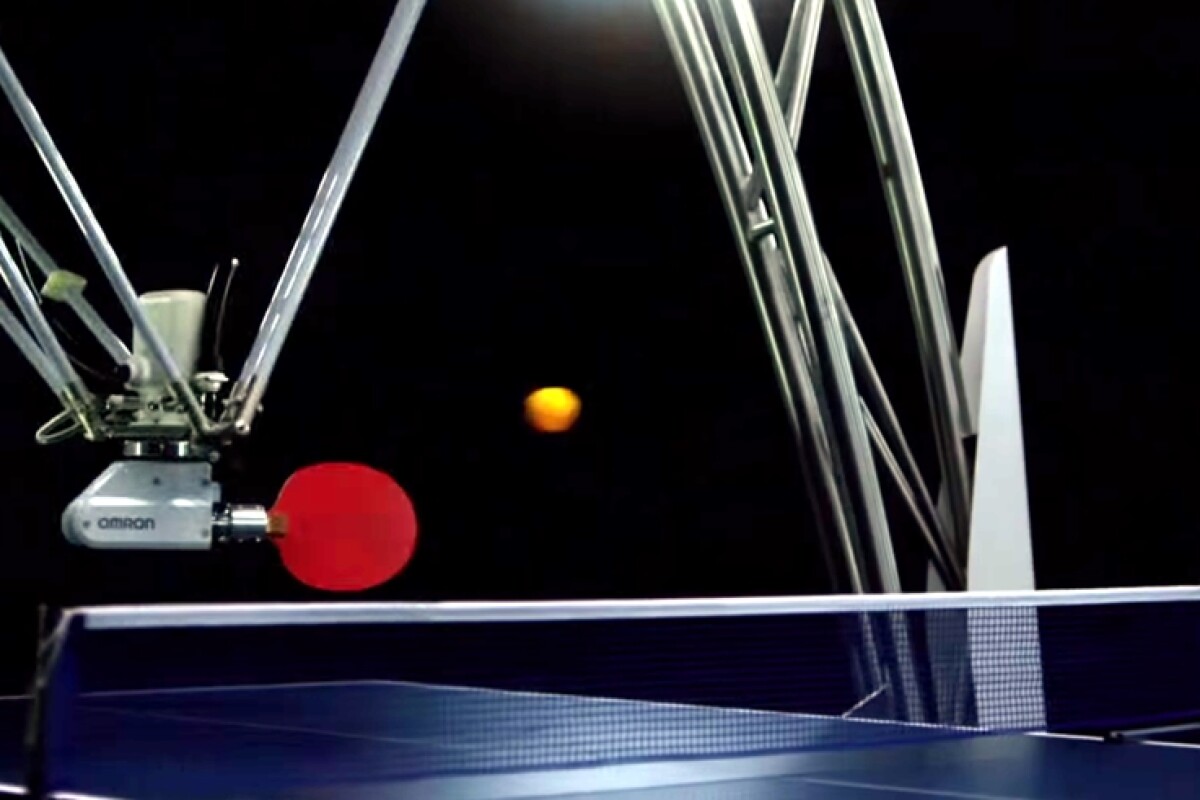
In order to hit a shot, the robot monitors the position of the ball, the position of the human opponent and the position of the opponent's bat before calculating the ball's likely trajectory and velocity. The robot then calculates the output required to return the ball to a spot that makes it easy for the opponent to hit and do so at the same velocity at which the ball was received. The process is takes a fraction of a second.
"The greatest feature of the ping-pong robot is that it shares a common goal of continuing a ping-pong rally with a human player, and makes calculated judgments about how they can achieve this shared goal," the company explains. "To make this a reality, it is important that the machine 'understands' a person’s conditions and takes action to support the person in a manner suitable for his or her conditions."
In this way, Omron says the robot demonstrates how sensing and control technology can be used for robots to cooperate with and assist humans.
The ping-pong robot was unveiled at CEATEC in Japan this week.
The video below provides an introduction to Omron's ping-pong robot program and shows the robot in action.
Source: Omron


