





NASA has chosen five studies to advance to phase 2 of its Innovative Advanced Concepts (NIAC) Program. The successful projects were chosen via a system of peer review, and represent the most promising technological concepts with the greatest potential to revolutionize the agency's approach to the building and operating of aerospace systems.
Each of the selected studies had previously been granted phase 1 NIAC funding of up to US$100,000, allowing teams to prove the feasibility of their initial concepts. The studies advancing to Phase 2 will receive an additional funding grant of up to $500,000 over the course of a two-year period, with an emphasis on developing and refining the concepts, whilst at the same time considering real world application with regard to future NASA missions.
"Technology drives our futures in exploration, science and commercial space; and investments in these advanced concepts must be made to ensure we will have the spectrum of capabilities for the near term and well into the 21st century," states Michael Gazarik, associate administrator for Space Technology. "NASA's Space Technology Mission Directorate is creating the technologies needed for today, while also investing in the concepts that will become technological realities of tomorrow.”
The five technology concepts selected to advance to phase 2 of the NIAC program are as follows:
Spacecraft-rover hybrid
This Stanford University-designed concept is designed to explore small celestial bodies such as comets or moons, deploying from a parent spaceship in much the same way that the Rosetta comet chaser will deploy the Philae lander. However, using the term "rover" to describe the vehicle created by Marco Pavone, principal investigator of the project, is arguably a bit misleading.
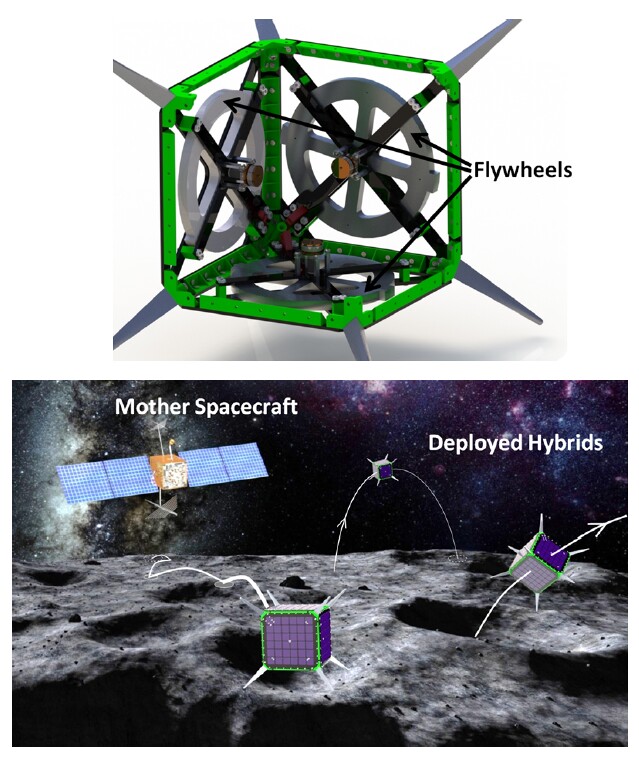
"Rover" puts you in mind of NASA's Curiosity or Opportunity programs, which incorporate wheeled laboratories that trundle across the surface of Mars like a snail traversing a particularly large pebble. Pavone's hybrid is designed to take a more daredevil approach, tumbling and hopping to the next site of scientific curiosity under the power of a series of three spinning flywheels. The lower the gravity of the celestial body, the further the rover will be able to hop.
Aesthetically, the rover/spacecraft hybrid takes the form of a cube, with short struts protruding from each corner. The simple design of this little explorer allows for scientific equipment to be stored safely inside a single sealed enclosure. It is hoped that this design will be able to explore a much greater distance than conventional rovers. The hybrid will cover the longer distances with the altitude-controlled hops, whilst moving in a more precise manner via a slower tumbling process, with mission commands, navigation, and communication being relayed by the parent spacecraft from orbit.
Low-Mass Planar Photonic Imaging Sensor (AKA SPIDER)
This University of California, Davis proposal would seek to provide a smaller, lighter, and ultimately cheaper alternative to large-aperture space telescopes such as the Hubble observatory. The aim of the project is to create a wide-field electro-optical imaging sensor, via the use of millions of white-light interferometers mounted onto photonic integrated circuits.By doing away with the bulky platform set-up required for conventional large-aperture telescopes, it is hoped that this technology will be compact and light enough to be put to use in some of the agency's planned next generation missions, including a planned Europa, Mars Reconnaissance orbiter.
10 meter Sub-Orbital Large Balloon Reflector (LBR)
The LBR concept aims to deploy a vast balloon, housing a 10-meter spherical reflector telescope, which will float up to the edge of Earth's atmosphere, operating from radio to THz frequencies. The LBR, designed under Christopher Walker of the University of Arizona, will fulfill a multifunctional role. Primarily the balloon will act as a 10-meter inflatable spherical reflector, however it will also be able to study the Earth's atmosphere, taking readings on greenhouse gasses whilst providing a focal point for selected telecommunications and surveillance operations.By positioning the LBR high in Earth's stratosphere, the balloon-borne telescope could operate free from 99 percent of the distorting effects created by our planet's atmosphere, allowing it to obtain much clearer observations of distant celestial objects than any comparative ground-based telescope. The LBR will also achieve this without going through the costly requirement of mounting the equipment in a modified Boeing 747, as is the case with the SOFIA observatory. This is because the housing for the large 10-meter telescope acts as its own launch vehicle, making the project a very appealing prospect from a fiscal perspective.
Orbiting Rainbows
This ambitious project, led by Marco Quadrelli of NASA's JPL, was inspired by the light scattering and focusing effects observed in nature. Quadrelli's ultimate aim is to place a cloud-like formation of tiny spacecraft in orbit that could be manipulated to create any size of aperture in-situ, with each constituent element of the swarm moving into position under its own power (albeit with guidance from an external source).
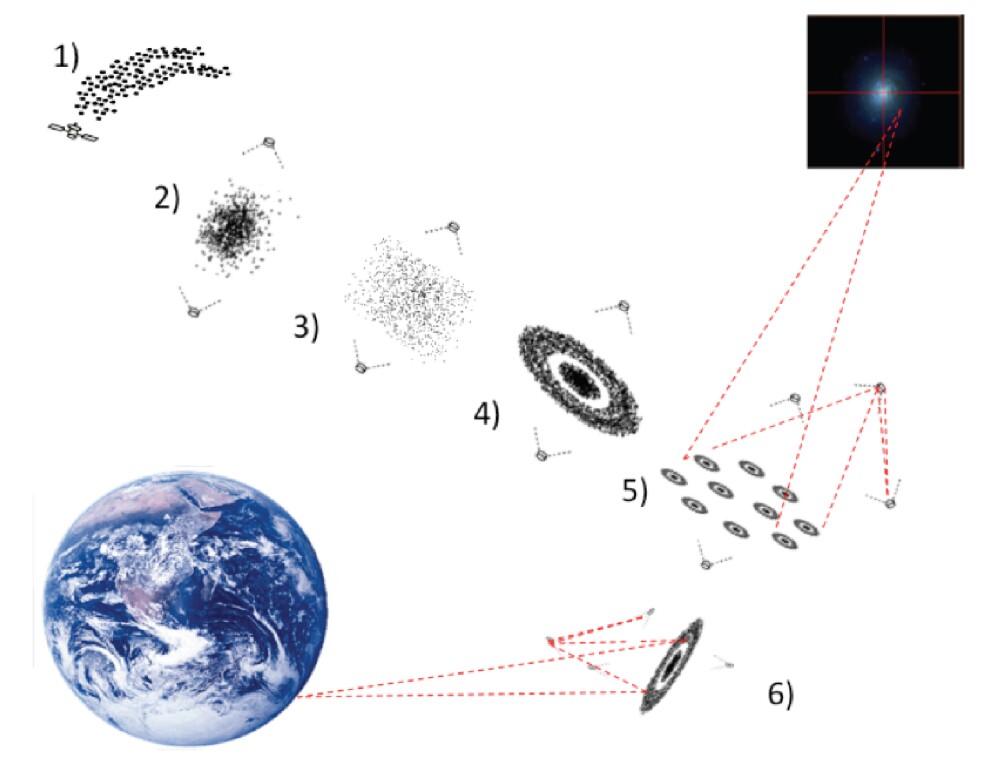
It is hoped that this "smart dust" concept could eventually be used to carry out advanced imaging tasks, such as searching for exoplanets, and even undertaking high-resolution observation of other planets in order to discern specific features, for example continents.
Deep mapping of small solar system bodies with galactic cosmic ray secondary particle showers
The concept put forward by Thomas Prettyman of the Planetary Science Institute, Tucson, Arizona, investigates the use of muon particles, the charged component of galactic cosmic rays, to image both the interior and the exterior of small solar system bodies (SSBs) such as comets and asteroids. Data collected from such a technique could be used to determine not only an object's surface features that could aid in the mapping and navigating of an SSB for either robotic or human explorers, but also to determine the composition of the inside of an SSB, identifying potential resource-rich areas that could be exploited by future mining missions.
Source: NASA

![The Ti EDC [everyday carry] Wrench is currently on Kickstarter](https://assets.newatlas.com/dims4/default/0ba225b/2147483647/strip/true/crop/4240x2827+0+3/resize/720x480!/quality/90/?url=http%3A%2F%2Fnewatlas-brightspot.s3.amazonaws.com%2F59%2Fb2%2F6a6fdd0348a8bfdad88bbcefec53%2Fdsc03572.jpeg)