




A team of MIT researchers has developed algorithms that allow robots to plan and execute underwater missions with minimal human input. The technology should free up valuable time for project engineers, and may even open the door to autonomous exploration of remote parts of the planet's oceans.
When undertaking modern underwater research projects, a large segment of the work routinely goes into manually ordering around robotic workers to accomplish mission goals. To tackle this, a team of MIT researchers has developed a system that gives robots greater "cognitive" abilities, allowing them to handle much of the planning and execution themselves.
The technology is built on levels of decision-making. One component makes high-level decisions (such as picking sites to explore), while another plans the optimum route, and a final component works to identify and address any issues that arise.
"We can give the system choices, like, 'Go to either this or that science location and map it out,' or 'Communicate via an acoustic modem, or a satellite link,'" explains Brian Williams, the principal developer of the system. "What the system does is, it makes those choices, but makes sure it satisfies all the timing constraints and doesn’t collide with anything along the way. So it has the ability to adapt to its environment."

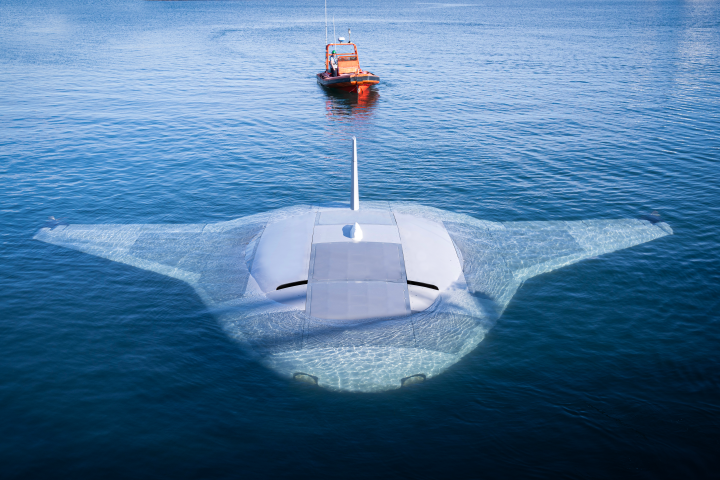
The research team worked with groups from the University of Rhode Island, Australian Center for Field Robotics and the Woods Hole Oceanographic Institution to test the system off the western coast of Australia in March 2015. Varying classes of AUVs (autonomous underwater vehicles) were put through their paces using the new technology, including an autonomous underwater glider.
The tests showed that an AUV using the mission planning system was able to work amongst other robots, mapping the environment while successfully avoiding collisions, and retargeting objectives if other AUVs were taking longer than expected to complete assigned tasks.
The team believes that the mission planning system has a lot of potential, freeing up engineers to work on the bigger-picture aspects of a project, while the machines carry out the field work autonomously. It also allows larger projects to be tackled by smaller teams.
The researchers will formally present the findings of the study in June at the International Conference on Automated Planning and Scheduling in Israel.
Source: MIT

![The Ti EDC [everyday carry] Wrench is currently on Kickstarter](https://assets.newatlas.com/dims4/default/0ba225b/2147483647/strip/true/crop/4240x2827+0+3/resize/720x480!/quality/90/?url=http%3A%2F%2Fnewatlas-brightspot.s3.amazonaws.com%2F59%2Fb2%2F6a6fdd0348a8bfdad88bbcefec53%2Fdsc03572.jpeg)