












HyQ is the Italian cousin of Boston Dynamics' DARPA-funded BigDog. Under development at Istituto Italiano Di Tecnologia (IIT) by a group of researchers led by Professor Darwin Caldwell, this Hydraulically actuated Quadruped robot is being groomed to navigate rough terrain, jump and run at speeds up to 15 km/h (9 mph).
Unlike Boston Dynamics' quadrupeds, HyQ is not a heavy-payload machine designed strictly for military applications. Instead, the robot could be used in rescue missions, on construction sites, for forestry applications and whenever there is a need to access areas not easily accessible to ordinary machines. However, before HyQ becomes part of the everyday landscape, it has another important role to play as an open source research platform.
As shown in the video below, HyQ is already quite a capable beast. It is fast, it is robust, it can squat jump, rear like a horse, move in an unnervingly insect-like fashion or kick a cardboard box. All these different types of movements were achieved through torque control, whereby the robot calculates what torque should be applied to each joint. The brain responsible for the calculations is a modest Linux-running PC.
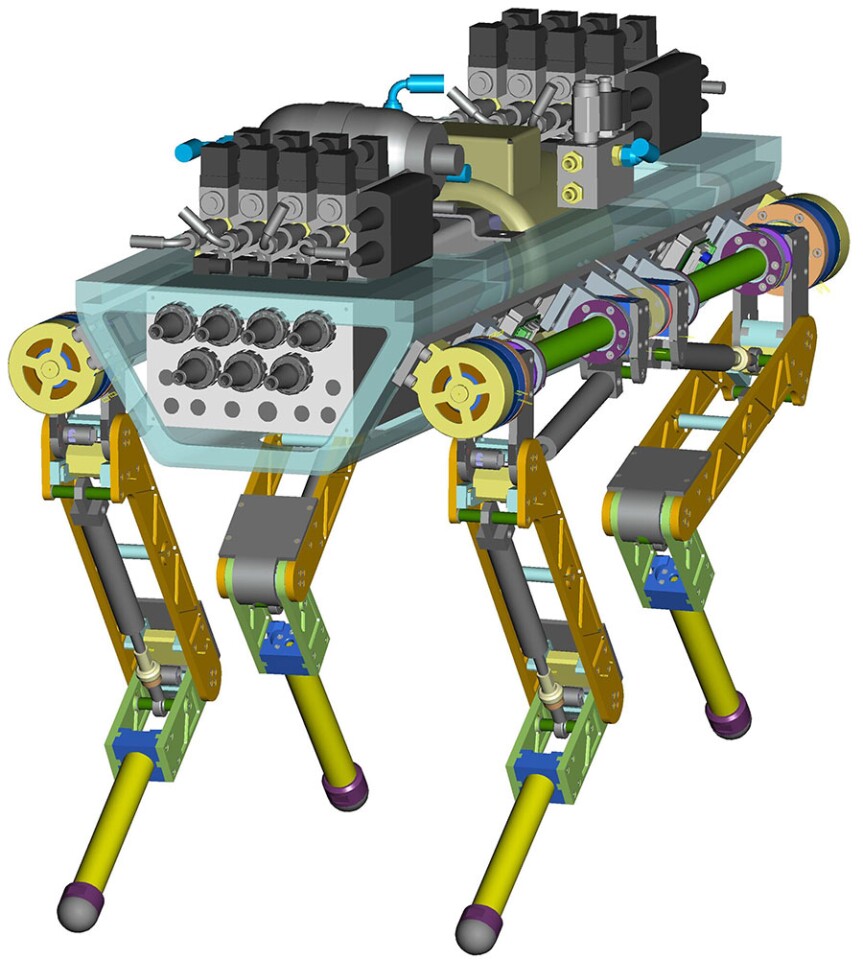
In order to ensure the high joint speed and torque necessary to perform all these stunts, HyQ has been fitted with 12 joints (3 per leg), of which eight are actuated by hydraulic cylinders and four are handled by brushless DC motors. Each of the light-weight aluminum and stainless steel legs offers three degrees of freedom (one in the knee and two in the hip), which guarantees flexibility of movement.
However, the most important leg design feature is that they are actively compliant. The position and torque of the legs is smoothly controlled by a set of high resolution encoders and load cells (position and force sensors) fitted on each joint. The stiffness of every limb can be quickly adjusted by changing the hydraulic flow of the actuators. This allows the robot to perform highly dynamic tasks, such as running and jumping, because the shocks and vibrations are instantly absorbed by the actuators.

But, as could be expected of a research platform, the leg design is still a work in progress. Several foot designs are still being considered. The aim is to find the most energy efficient solution that would store energy from one step to the next and at the same time would help soften the impact of the foot as it lands on the surface.
HyQ's trunk is made of stainless steel and a folded, 3mm thick sheet of aluminum alloy. The 1 m (3.28 feet) long, 50 cm (1.64 feet) wide and 98 cm (3.21 feet) tall robot weighs 90 kg with the hydraulic power supply on board, and 70 kg with external hydraulics. Hydraulic actuation offers high power density, high torque output and velocity. It also allows for high bandwidth torque control.
The downside is that the components are still rather bulky and not very energy efficient, but that is something the researchers at IIT's Department of Advanced Robotics intend to change. They also want to make HyQ power-autonomous, endow it with a head with a built in stereo camera and a laser range finder and give it an arm with a gripper.
The video below shows HyQ in some serious action.
Source: IEEE Spectrum


