

















There are an extraordinary number of companies converging on the idea of self-driving cars from all sorts of different angles, but the undisputed leader of the pack is Google, whose self-driving vehicles have logged a total of nearly 700,000 development miles. In a video released today, Google shows some fantastic visualizations to demonstrate what the car is seeing in complex traffic situations. You can watch how the car handles roadworks, level crossings, complex intersections and a range of interactions with cyclists – including recognizing their hand signals.
The images in the gallery show what Google’s Self Driving Car is seeing in a range of traffic conditions through its 360-degree cameras. Let’s take a look at some of them in closer detail:

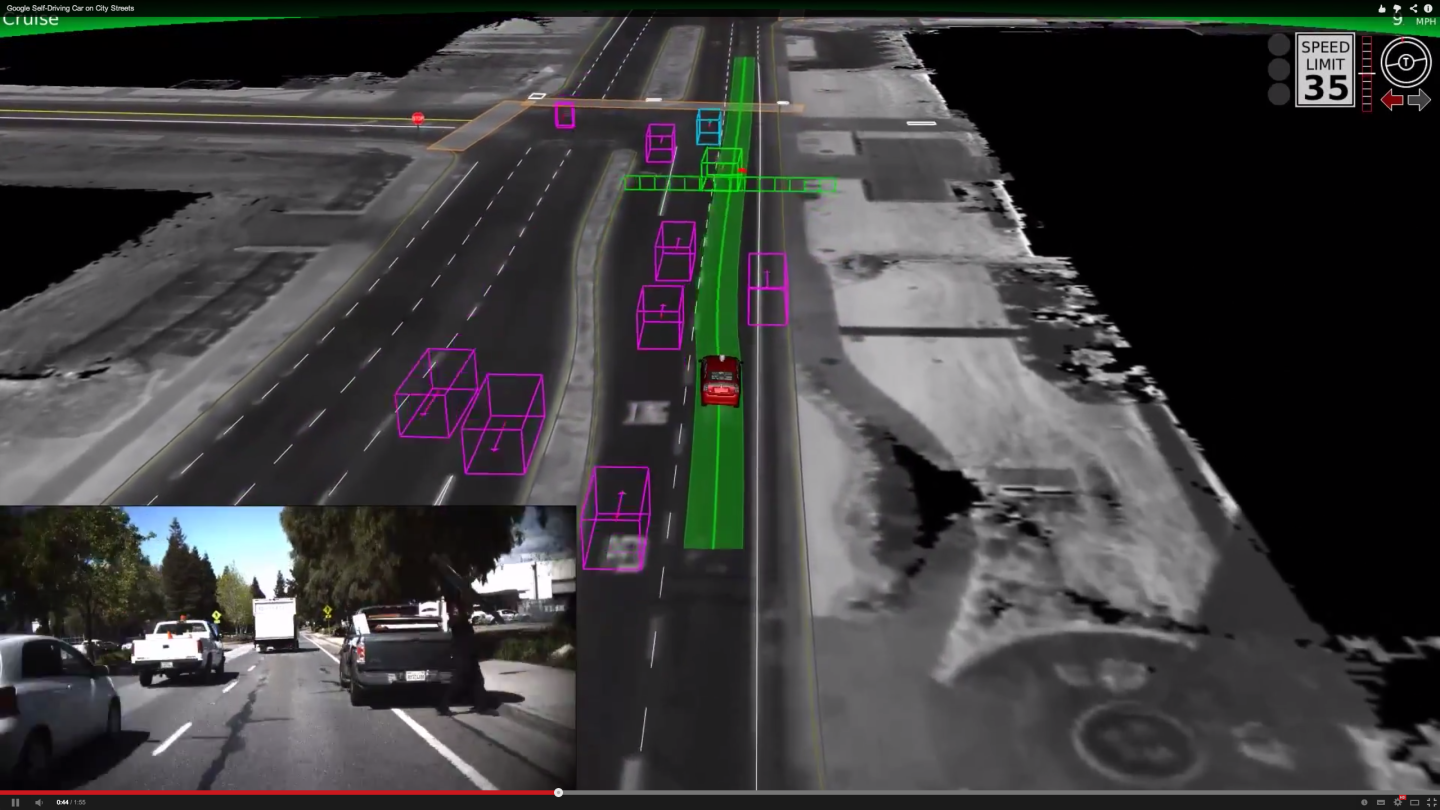
In this image, the car has spotted a roadworks scenario blocking the road. It sees the signage in yellow, plus a bunch of cars in purple, and a group of witches hats in orange. It’s approaching the scene with caution and has not yet made a decision to proceed – the red line indicates a barrier the car will not cross.
In this image, the car is adjusting its lane position to give a wide margin to a parked car.
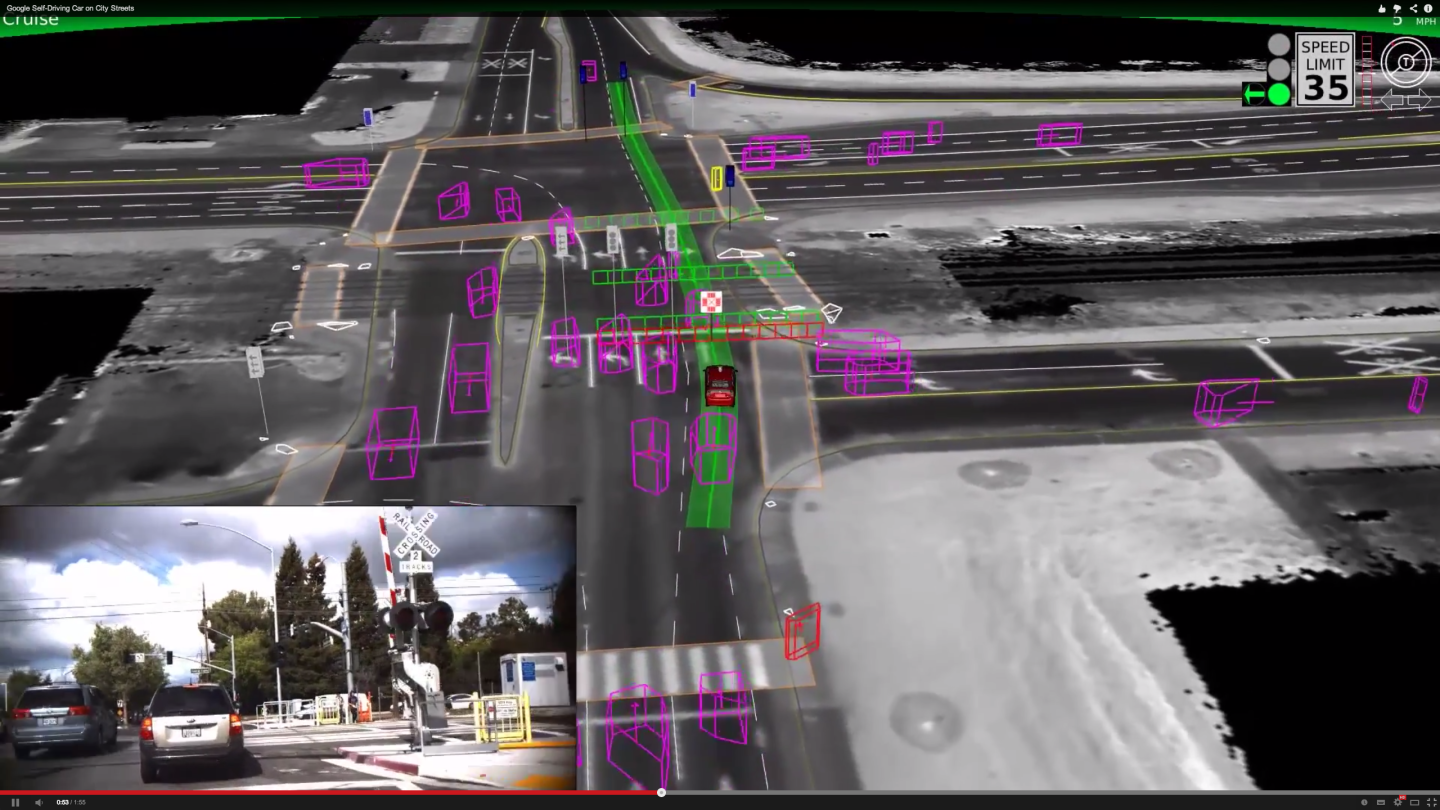
In this image, the car has recognized a rail crossing, and the red bar shows that it won’t begin to cross the train tracks until the traffic is clear on the other side.

This image shows the car recognizing a cyclist’s hand signal indicating that he’s coming out into the center of the road. The green bar shows that the car won’t pass the cyclist under these conditions, and the other red object is another cyclist traveling behind the car.
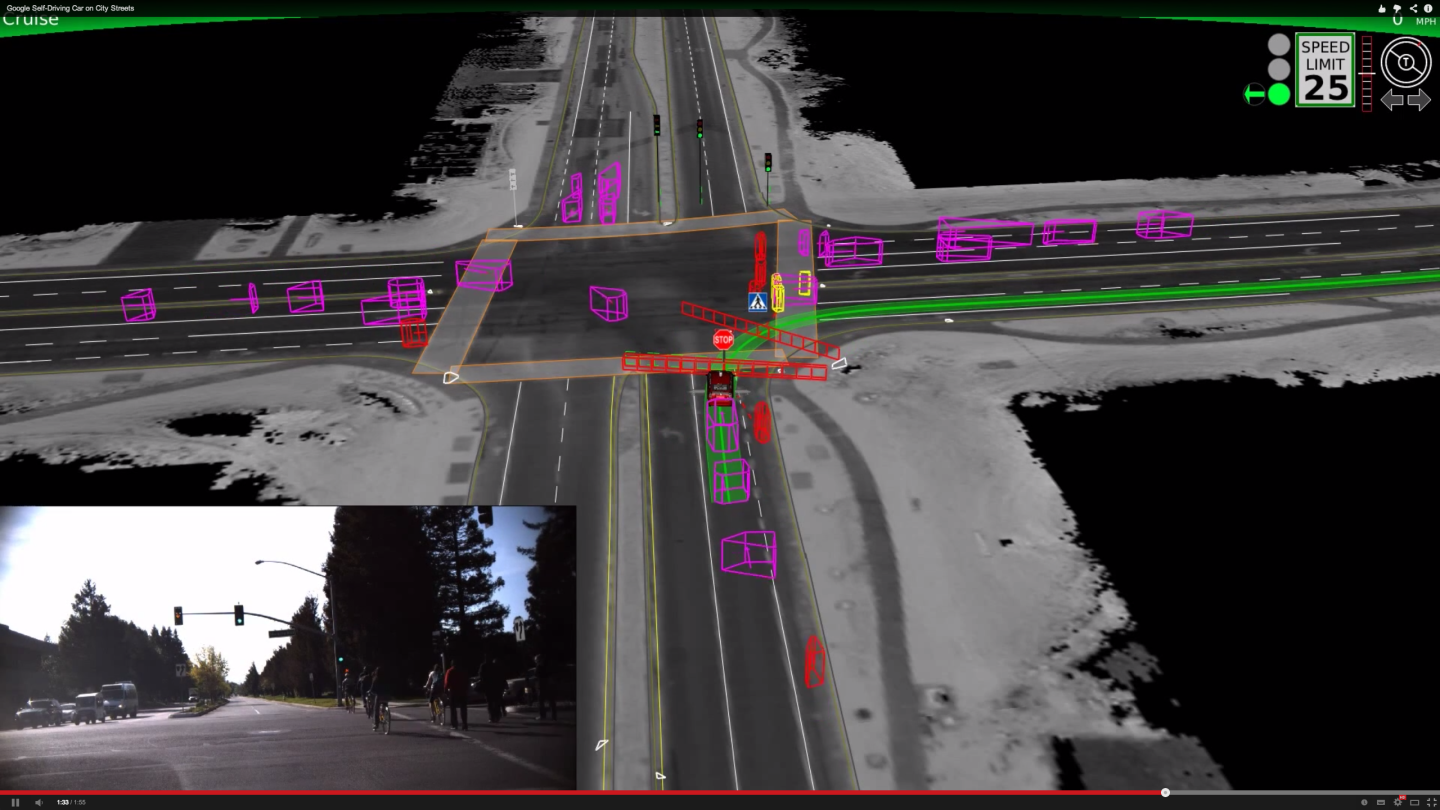
This image shows the car dealing with a typically complex city traffic situation. As the lights have gone green, a number of pedestrians and cyclists have all started to move through the intersection. The car sees and tracks each of them individually, stopping at the intersection until all cyclists and pedestrians have moved through, and even waiting for a cyclist behind the car to come through rather than impede its path.
With 360-degree vision and non-stop eagle-eyed attention, the Google car is already proving a far safer driver than most humans – at least, under the conditions it’s currently being tested under.
But don’t hold your breath – it’s still a long way from being a product you can buy, and there’s a range of issues such as localization, licensing and liability, regulatory approval and general public opinion to get past before self-driving cars become a commercial reality on our roads.
Still, this is some seriously amazing technology, and driverless cars are more or less an inevitability in the coming decades. Safe, cautious and courteous to a fault, they won’t be the fastest way to get from A to B, and they’ll probably be as annoying to be stuck behind as an overly cautious octogenarian - but they will certainly save lives. At least, until somebody develops a way to jailbreak the software and install some Ken Block drifting firmware.
Source: Google



