








Researchers at ETH Zurich have demonstrated an amazing capability for small robots to self-assemble and take to the air as a multi-rotor helicopter. Maximilian Kriegleder and Raymond Oung worked with Professor Raffaello D’Andrea at his research lab to develop the small hexagonal pods that assemble into flying rafts. The true accomplishment of this research is that there is not one robot in control – each unit in itself decides what actions to take to keep the group in the air in what's known as Distributed Flight Array.
How It Works
The sequence starts with an arbitrary group of robots on the ground. Each robot has three omnidirectional wheels that allow it to rotate and drive in any direction. The robots are programmed to seek a common spot, for example, a brightly lit area. As the robots approach one another, one robot spins in a circle while the other drives around it in a pirouette. Interlocking tabs on the outside of the robots make a physical connection, while infrared light beams carry data between the modules.Once all the modules in the area are connected, there is a brief calibration of sensors while nothing is moving, and then the entire group start their propellers in unison and take to the sky. Half the modules need to have clockwise propeller rotation, while the other half rotate counterclockwise, in order to cancel out torque.
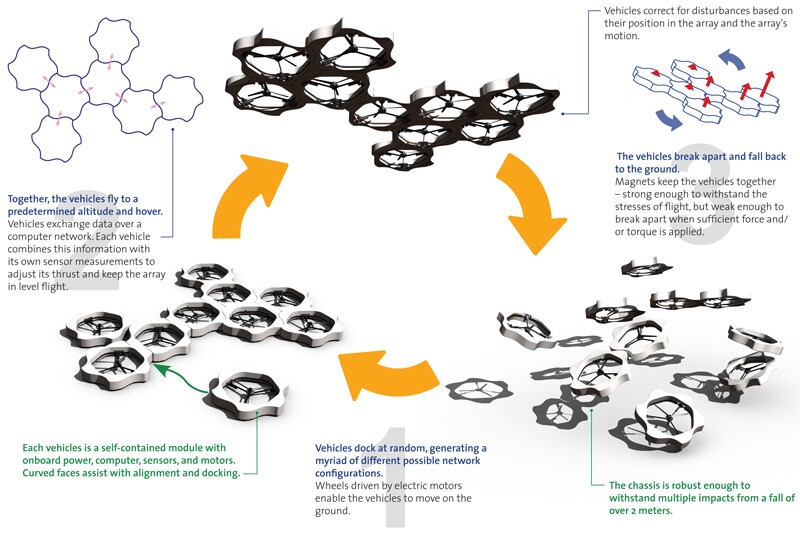
As the united band of robots hovers and climbs off the ground, each robot module is using inertial sensors to detect tilt and roll – exactly the same sensors found in an iPhone or iPad to detect tilt. Each of the modules determines how to correct for pitch (forward and back tilting) and roll (side to side tilting) by making small adjustments to the speed of its propeller. The data link on the infrared light beams helps the robots decide which direction and axis is which.
Once the raft of flying robots reaches a pre-determined altitude, as measured by another sensor, they break apart and each tumble to the ground. The individual units are not capable of independent flight due to torque from their single propeller. Once back on the ground, the whole dance starts again, with the robots again deciding on a center, forming a group, and assembling into a random shape.
The real heart of this work as a research project is solving the controls problem of flying an arbitrary shape of propeller units. It’s not just a standard shape like a ring or a cross that can fly, but any shape made of up any number of units.
This is the second type of flying robot unit that the group has created. The first model used magnets to hold the units together, and small electrical pins to allow communications. This second model has a more robust mechanical petal leaf latch between the robots and uses non-contact IR light beams for communications. Both robots had bodies created on 3D printers that build up plastic designs directly from CAD drawings.
Distributed control
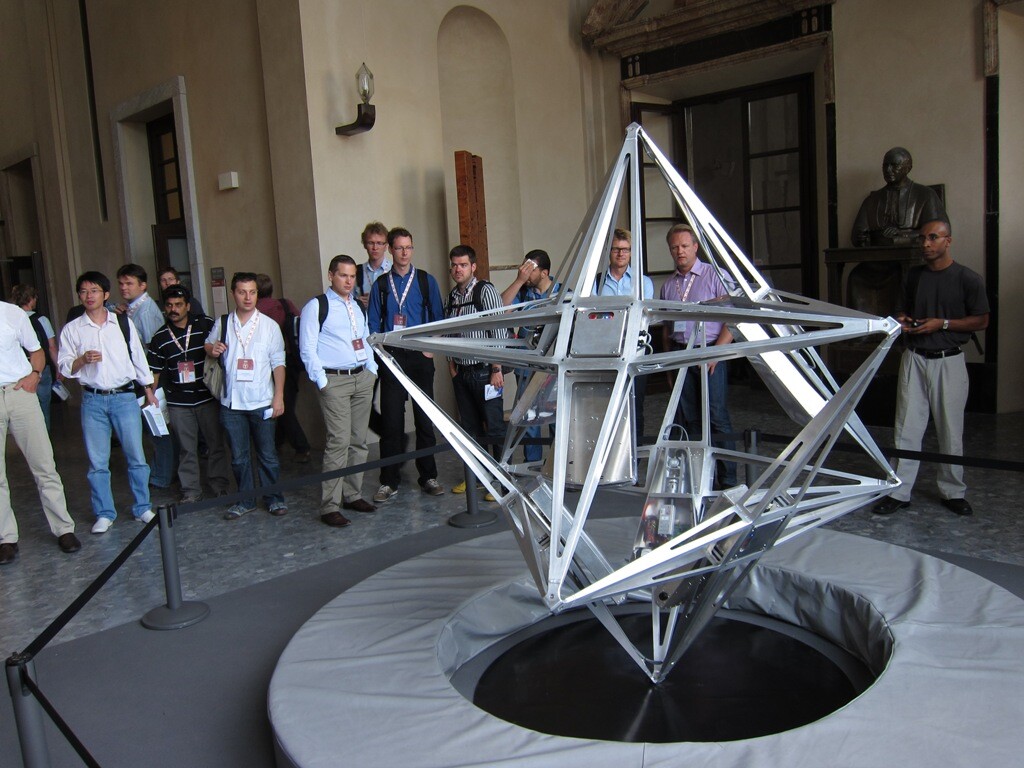
Professor D’Andrea has several similar groundbreaking projects on his very impressive resume. He is one of the founders of Kiva Robotics, the distributed mobile robots that help make Amazon.com warehouses efficient. A whole fleet of small robots go out into the warehouse and find product on shelves and bring it, shelf and all, to pickers – humans – who place items into boxes. The robots then take the shelves back to the warehouse. For efficiency, the most picked items are placed closest to the packers, making the warehouse self-organized for speed.A similar distributed control problem the group solved was a beautiful self-balancing cube. Each segment of this cube structure had its own independent control of its center of gravity, and the group could also be assembled in arbitrary shapes that would then balance themselves on a point.
Another fascinating construction is the Blind Juggler, a self-regulating, self-correcting mechanism that bounces a ball on a paddle – without any sensors or feedback at all. By careful design of the mechanics, the Blind Juggler automatically corrects the path of the ball to reduce error and keep the ball in the air. It’s an elegant solution to the problem without using any computers or robotics at all.
Nature has provided a blueprint for this area of research by way of the colony instincts that drive ants and bees to form such integrated and productive groups, with no central leader and no command authority. Each worker bee or soldier ant has its own programming, provided by nature and evolution, and each manages to do small tasks that contribute to the group as a whole building structures, finding food, and repairing damage done by storms and predators.
Applying this biologically-inspired solution to swarms of robots could enable a wide range of applications. Swarms of robots could be used to explore other planets, or search a large area for a missing person. When a larger payload needs to be lifted, groups of robots would combine to make a larger flying platform and when that job was done, disperse into smaller groups that can cover a larger area. The advantage of distributed control in these scenarios is that there is no vulnerable central control unit which, if taken out, could bring down the entire mission.
Watch the self-assembling robots take flight in the following video.
Source: ETH Institute for Dynamic Systems and Control via Wired Magazine


