











The murky details of DARPA's sub-hunting drone project are a bit clearer, thanks to a new concept video published by Science Applications International Corporation (SAIC). DARPA is spending US$58 million to have SAIC build the first Anti-Submarine Warfare Continuous Trail Unmanned Vehicle (ACTUV), which will detect and track a growing number of stealthy, inexpensive diesel-electric subs.
It's interesting to note that, unlike some of the UAVs which have garnered so much negative press lately, the ACTUV is completely unarmed. It neutralizes the threat posed by enemy submarines simply by detecting and tracking them. And it will do so autonomously – human control is only required as the drone enters and exits a busy port. The ACTUV is expected to function for 60 to 90 days in rough to very rough seas, before returning to refuel and receive any repairs.
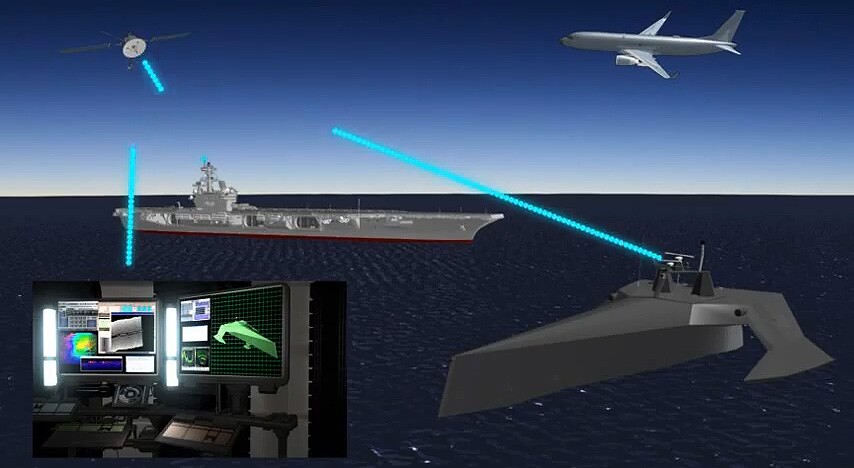
Navigation will be performed using a combination of artificial intelligence and on board sensors, which include electro-optics, long-range and short-range radar, and LIDAR (Light Detection And Ranging). A set of underwater sensors provides long-range detection of submarines while reducing false positives. Once the ACTUV has closed in on its target, it uses a pair of high-frequency active sonars with overlapping coverage to improve its tracking and precision, while a total field magnetometer array provides additional information of the target's activities. At close range, it will be able to determine the submarine's make and model by taking an acoustic image with a very high-frequency sonar.
All of this data will be parsed by the artificial intelligence system's logic to infer a sub's intentions. For example, one of the tactics employed by submarines is to use surface traffic to evade detection. Knowing this, the ACTUV will keep track of ships both above and below the water simultaneously. It will use this positional awareness to seamlessly adjust its route, so that it can continue to track a sub while avoiding any surface-level ships. Of course, if it makes a mistake, such as tracking a red herring, the operator can easily take over to make the necessary corrections.
It'll be a few years before the first ACTUV is tested out at sea, but if it lives up to the following video's hype, it could be a real game-changer.


