







NASA took the metaphorical training wheels off the Mars rover Curiosity on Tuesday, as the unmanned explorer took its first drive using autonomous navigation. It used its onboard cameras and software to select and drive over an area of ground that mission control at the Jet Propulsion Laboratory (JPL) in Pasadena, California couldn't see and vet beforehand. This capability allows the nuclear-powered rover to negotiate the most direct route to Mount Sharp rather than having to detour to find routes that can be seen directly by Curiosity before entering, so they can be analyzed by mission control.
Technically, this is the second autonomous drive made by Curiosity. The previous one was a test drive under the supervision of mission control over an area that was studied in advance before Curiosity had a go.
Tuesday’s drive was a short one of only about 33 ft (10 m) out of 141 ft (43 m) traveled that day, but what made it significant was that that drive was through a depression that couldn't be looked into beforehand, so Curiosity had to pick out its route as it went.
"We could see the area before the dip, and we told the rover where to drive on that part. We could see the ground on the other side, where we designated a point for the rover to end the drive, but Curiosity figured out for herself how to drive the uncharted part in between," says John Wright, a rover driver at JPL.
According to Mark Maimone, rover mobility engineer and rover driver at JPL, autonomous driving is largely a visual approach similar to that used by the NASA Mars rover Opportunity. "Curiosity takes several sets of stereo pairs of images, and the rover's computer processes that information to map any geometric hazard or rough terrain. The rover considers all the paths it could take to get to the designated endpoint for the drive and chooses the best one."
NASA determined that Curiosity has now traveled a total of 0.86 mi (1.39 km) since landing in August 2012 with another 4.46 mi (7.18 km) to go before reaching Mount Sharp. NASA has already mapped out a “rapid transit route” to get there using the HiRise cameras on its Mars Reconnaissance Orbiter, though the agency points out that the actual route must be sorted out by Curiosity itself with the help of mission control.
Along the way, Curiosity will stop at predetermined waypoints to carry out experiments. "Each waypoint represents an opportunity for Curiosity to pause during its long journey to Mount Sharp and study features of local interest," says Curiosity Project Scientist John Grotzinger of the California Institute of Technology, Pasadena. "These features are geologically interesting, based on HiRISE images, and they lie very close to the path that provides the most expeditious route to the base of Mount Sharp. We'll study each for several sols, perhaps selecting one for drilling if it looks sufficiently interesting."
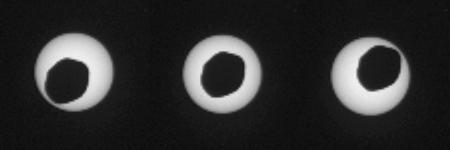
In addition to its driving, Curiosity also indulged in a bit of astronomy on August 17th, by taking enough images of a solar eclipse by the larger Martian moon Phobos to create a brief movie. The images were taken with a telephoto lens and are the sharpest ever taken of a Martian eclipse. Earlier, another phenomenon that the rover recorded was the eclipse of the smaller moon Deimos by Phobos.
The video below shows that eclipse.
Source: NASA



