






















Today, NASA paid tribute to its Curiosity rover, which has completed its first year exploring the planet Mars. On August 6, 2012 (August 5, PDT), the unmanned explorer landed on the Red Planet as the start of a two-year mission to seek out areas where life might have once, or could still exist. To commemorate this event, the space agency broadcast reminiscences by Curiosity team members from NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California. What follows is our own look at the top 10 milestones of Curiosity’s first year.
To be technical, it’s actually the end of Curiosity’s first Earth Year on Mars. In Martian years, it’s only halfway to the anniversary mark, at about 356 out of 668 Martian days. In that time, the nuclear-powered explorer has sent back to Earth 190 gigabits of data, fired its laser 75,000 times, collected and analyzed samples from two rocks and clocked over one mile (1.6 km) on the odometer – if it had an odometer. It’s been an eventful year that began with what NASA calls “seven minutes of terror.”
The landing
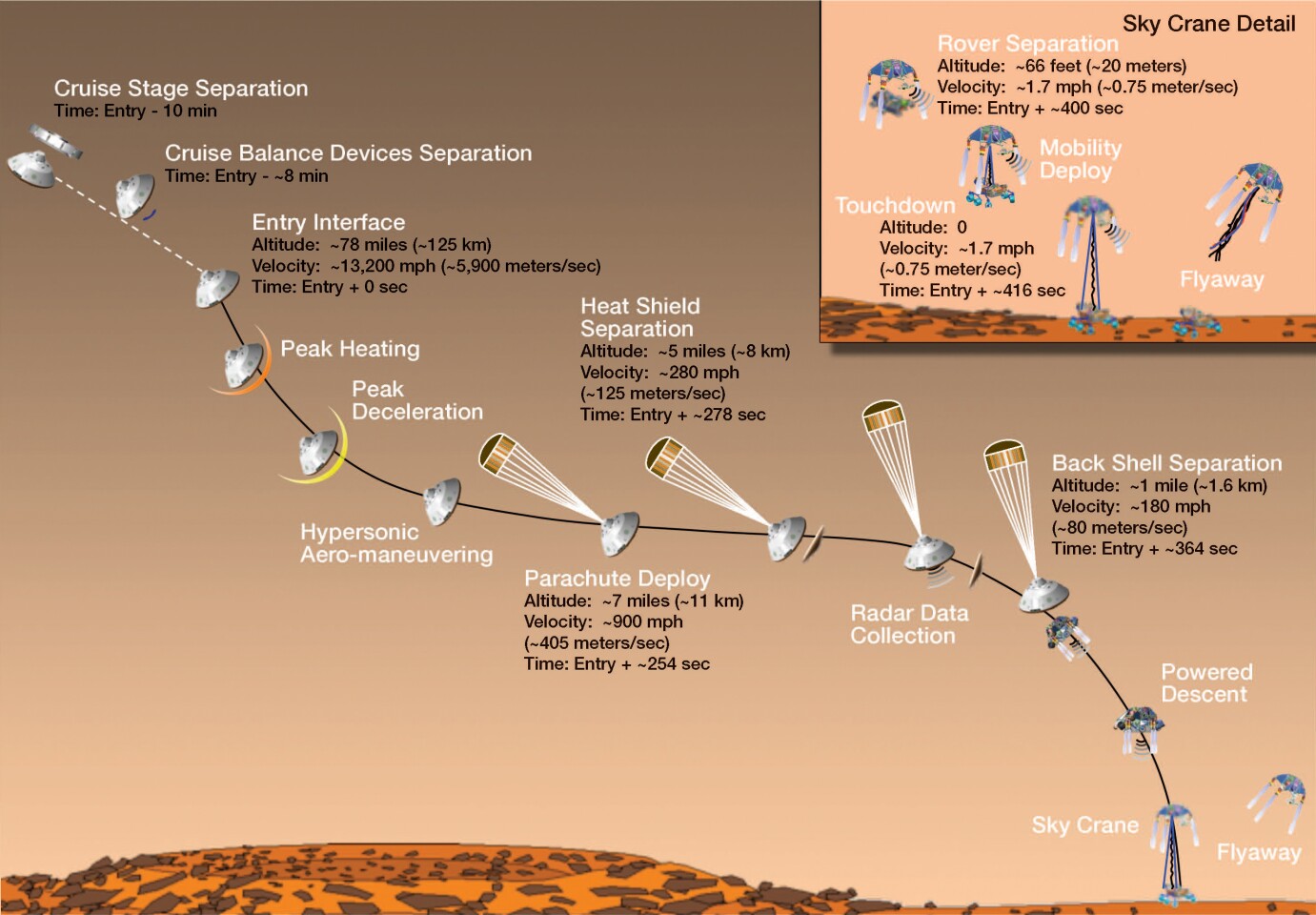
On August 6, Curiosity made the sort of entrance that’s usually associated with Tony Stark at a rock concert. The distance between Earth and Mars at the time Curiosity arrived was so great that the spacecraft had to make an entirely autonomous landing with mission control acting as a bystander on a 13-minute delay. Small wonder there was so much nail biting as the aeroshell containing the lander hit the thin Martian atmosphere at hypersonic speed.
Curiosity was protected by a revolutionary heat shield that not only protected it, put also acted as a lifting body that allowed the craft to steer itself as it slowed down due to atmospheric drag and a supersonic parachute. After the aeroshell and heat shield were jettisoned, the rover was lowered by a skycrane, which is a rocket-propelled frame with a winch that dropped Curiosity to the surface. The skycrane then flew off and crashed some distance away when its fuel ran out.
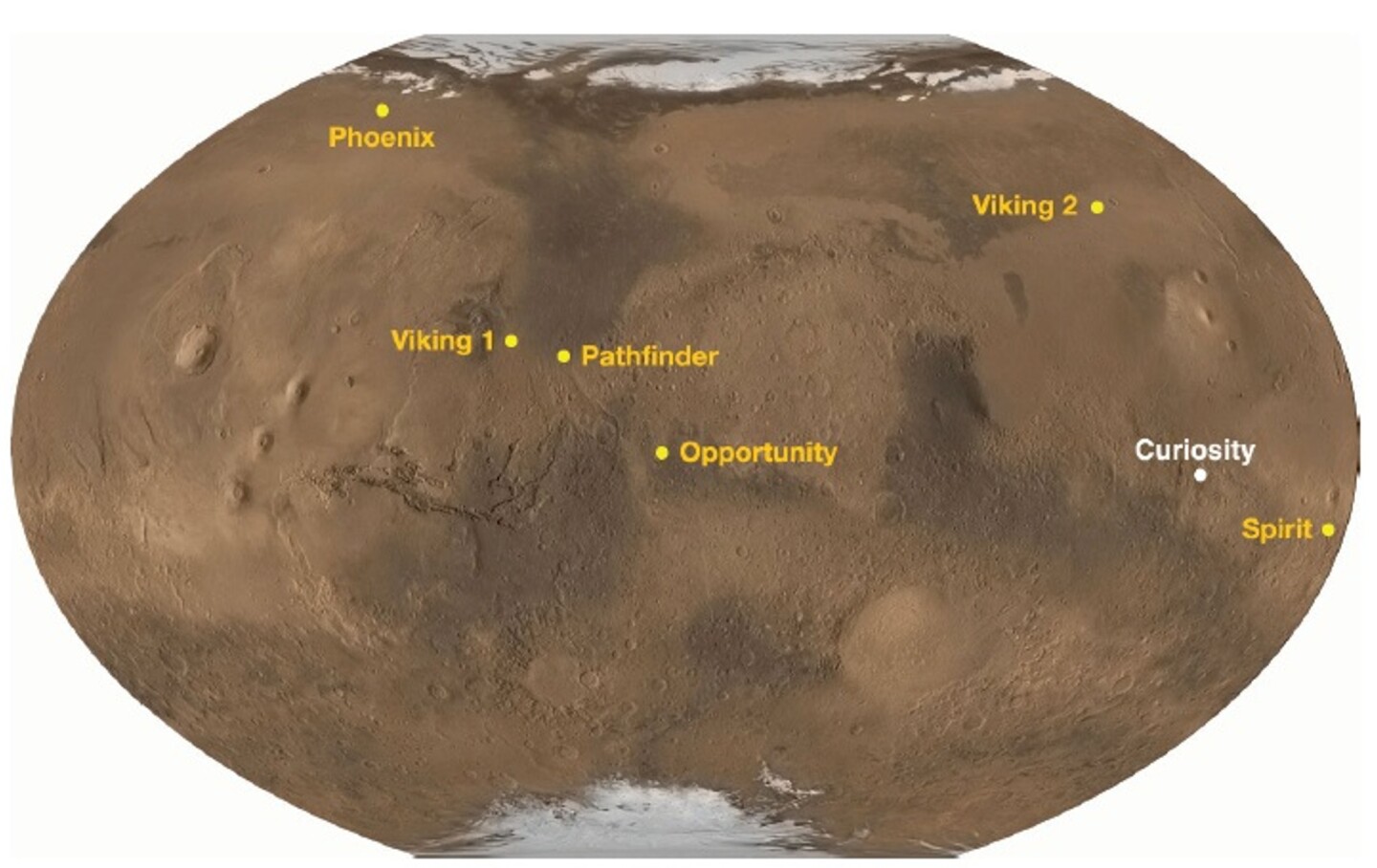
The landing occurred at 10:31 PM PDT (August 6, 05:31 GMT) plus or minus a minute. The landing site was near the base of Mount Sharp inside Gale Crater, 4.6 degrees south latitude, 137.4 degrees east longitude.
First laser zap
The first three weeks after landing were spent testing Curiosity’s systems to determine not only if they’d survived the landing, but also how they worked under actual Martian conditions. In addition, the rover’s software was swapped over with surface exploration programs replacing the ones used during the passage from Earth to Mars. However, the most dramatic test was firing its laser.
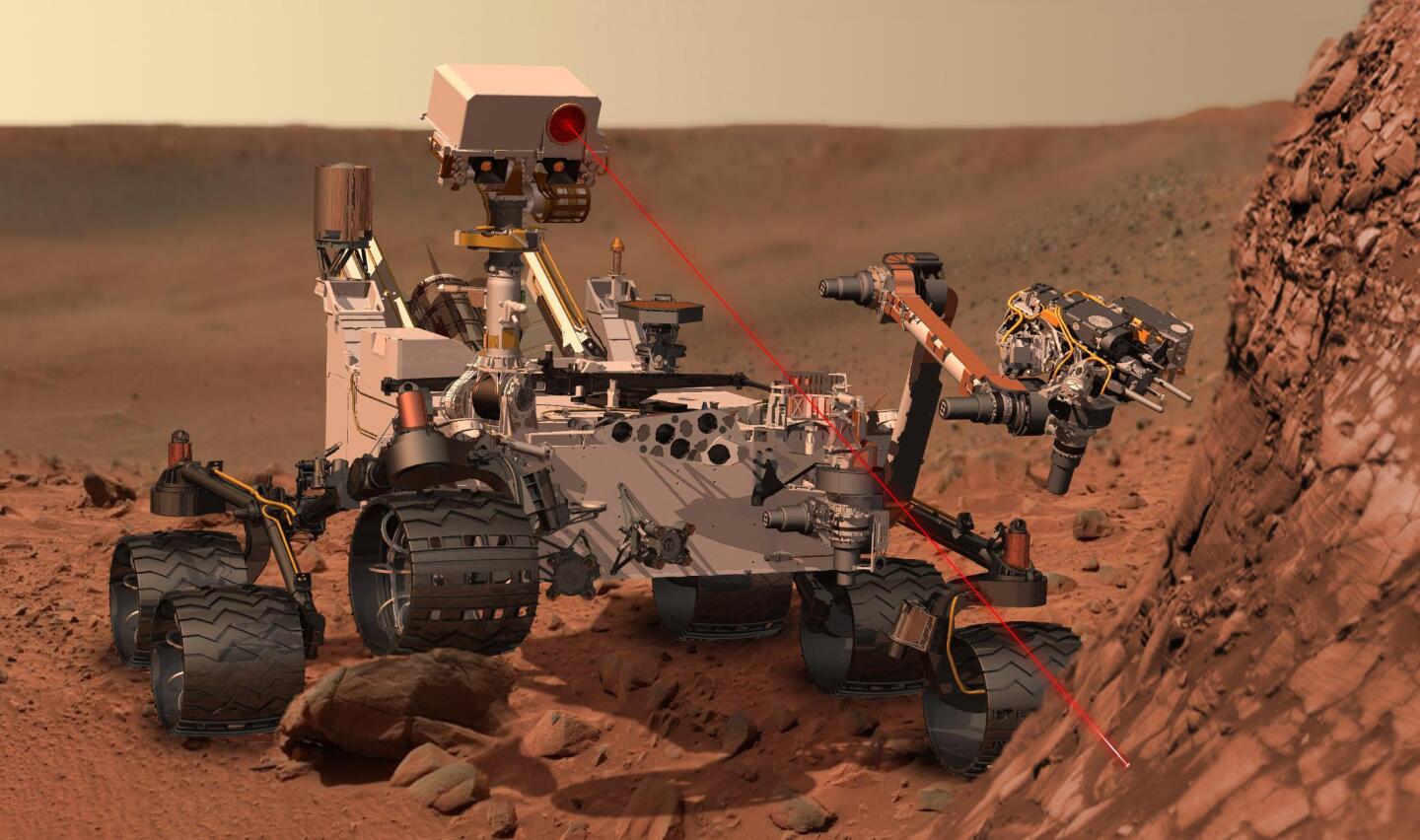
This wasn't a titchy little laser pointer sort of thing designed for taking ranges and the like. It was a 1,000,000-watt laser designed to vaporize rock, and was the first such laser to be used on another planet. Its purpose is to turn rock into puffs of plasma that can be studied by spectrograph to determine their composition. It's because the laser only fires for pulses lasting five one-billionths of a second that the million watt mark is reached. Any infinitesimally small amount of energy can equate to a million watts if you expend it infinitesimally quickly enough. The laser is part of Curiosity’s ChemCam system that sits on a mast on top of the rover and can work at distances up to 23 ft (7 m). The first shot was target practice, but once Curiosity was on the move, it would be used for serious geological studies.
First drive
Curiosity’s first drive was more of a parking maneuver. It drove a mere 15 ft (4.57 m), turned 120 degrees and then reversed about 8 ft (2.4 m). This brought it only about 20 ft (6 m) from its landing site, now named Bradbury Landing after the late author Ray Bradbury.
The rover uses a scaled-up version of the system used on the Sojourner, Spirit and Opportunity Mars rovers. It has six 20-in (0.5 m) titanium-spoked aluminum wheels, each with its own electric motor and traction cleats to deal with rough terrain. All four corner wheels can be steered and all the wheels are mounted on a rocker-bogie system to keep them in contact with the ground, regardless of how uneven the terrain. Although the rover only has a top speed of 0.085 mph (0.137 km/h), the wheels do put out very high torque to keep it from getting stuck in the sandy surface of Mars.
Streams human voice
A human touch came to the mission on August 28, 2012, when Curiosity for the first time in history streamed a human voice from the planet Mars back to Earth across 168 million miles (267 million km). It was a 500 kilobyte audio file containing a prerecorded message of congratulations for the engineers behind Curiosity from NASA administrator Charles Bolden.
The exercise not only made Curiosity less of an impersonal machine, but it also illustrated the challenges of sending a signal directly to Earth over a 15-watt radio beam, though the rover does get additional help from the orbiting Odyssey, Mars Reconnaissance Orbiter, and Mars Express spacecraft, which act as data relays.
Writes message on Mars

It isn’t just by radio that Curiosity sends messages. As it rolls across the Martian sands, the treads on its six wheels spell out “JPL” (Jet Propulsion Laboratory) over and over in Morse code (.--- for J, .--. for P, .-.. for L). JPL keeps insisting that this isn't to advertise itself, but rather acts in place of Curiosity’s lack of an odometer. By keeping Curiosity’s cameras trained on its tracks, mission control uses the code to measure how many times the wheels turn and from that they can calculate the distance traveled.
Flexes its arm
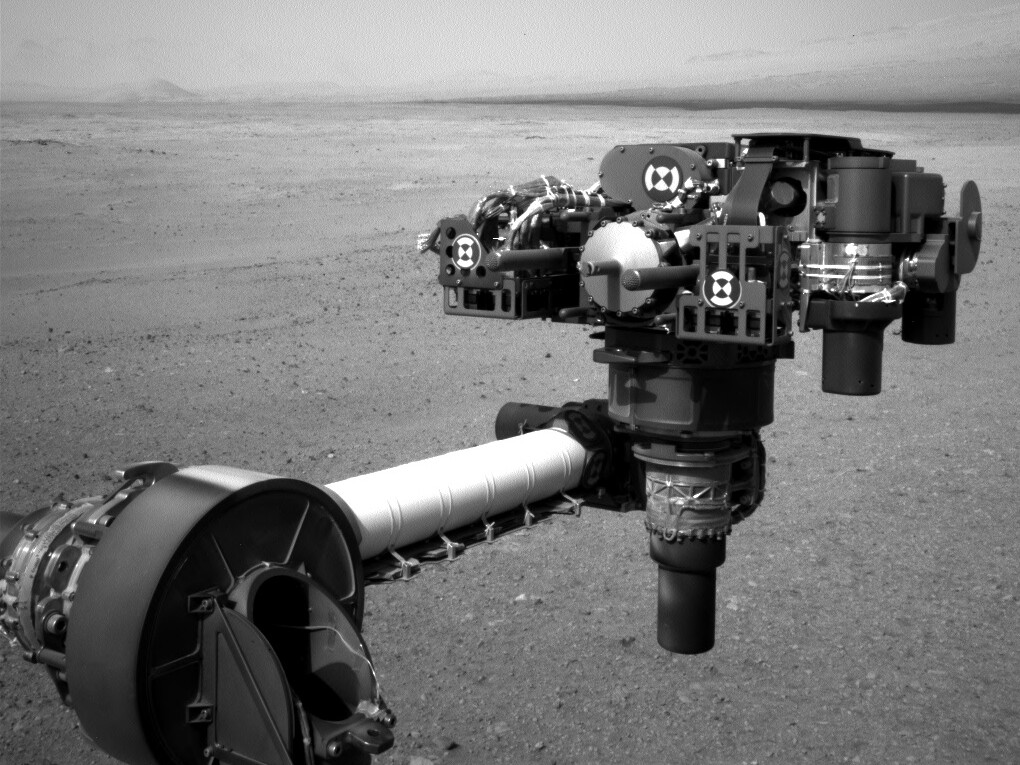
First tentative tests of Curiosity’s robotic arm were made on August 30, but it required extensive testing before it was cleared for duty. The 6.2-ft (1.88-m) arm has five degrees of movement and sports a formidable “hand” that weighs 73 lb (33.11 kg).
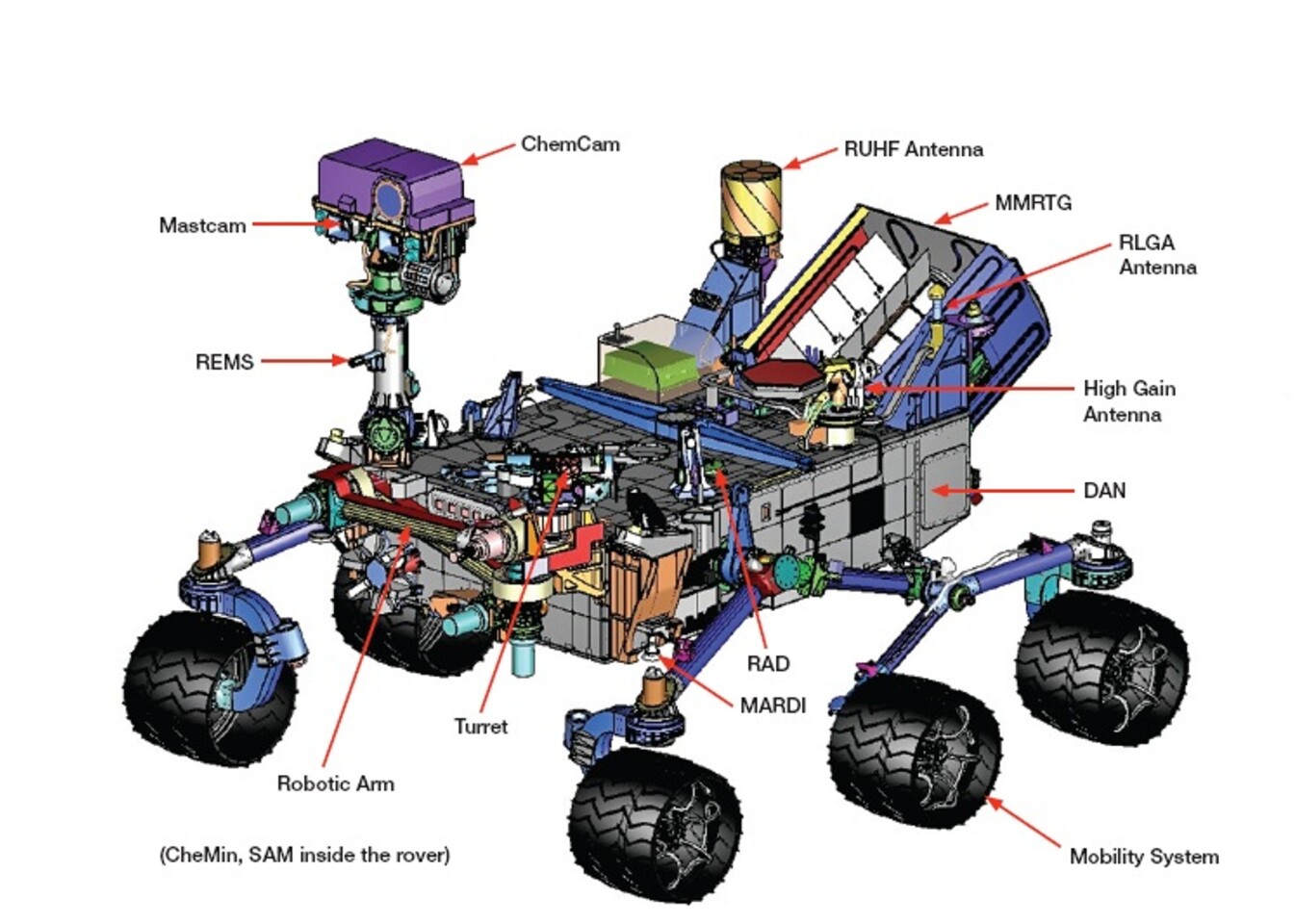
This hand is more properly referred to as a “turret” and contains a remarkable tool kit. The tools include a drill for boring into rocks and collecting powdered samples; an Alpha Particle X-ray Spectrometer (APXS); a sample processing subsystem called the Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA), which is a sort of glorified scoop; the Mars Hand Lens Imager (MAHLI), which is a digital magnifying glass; and, the Dust Removal Tool (DRT), a kind of high-tech brush for sweeping dust off of rocks.
Discovery of ancient stream bed
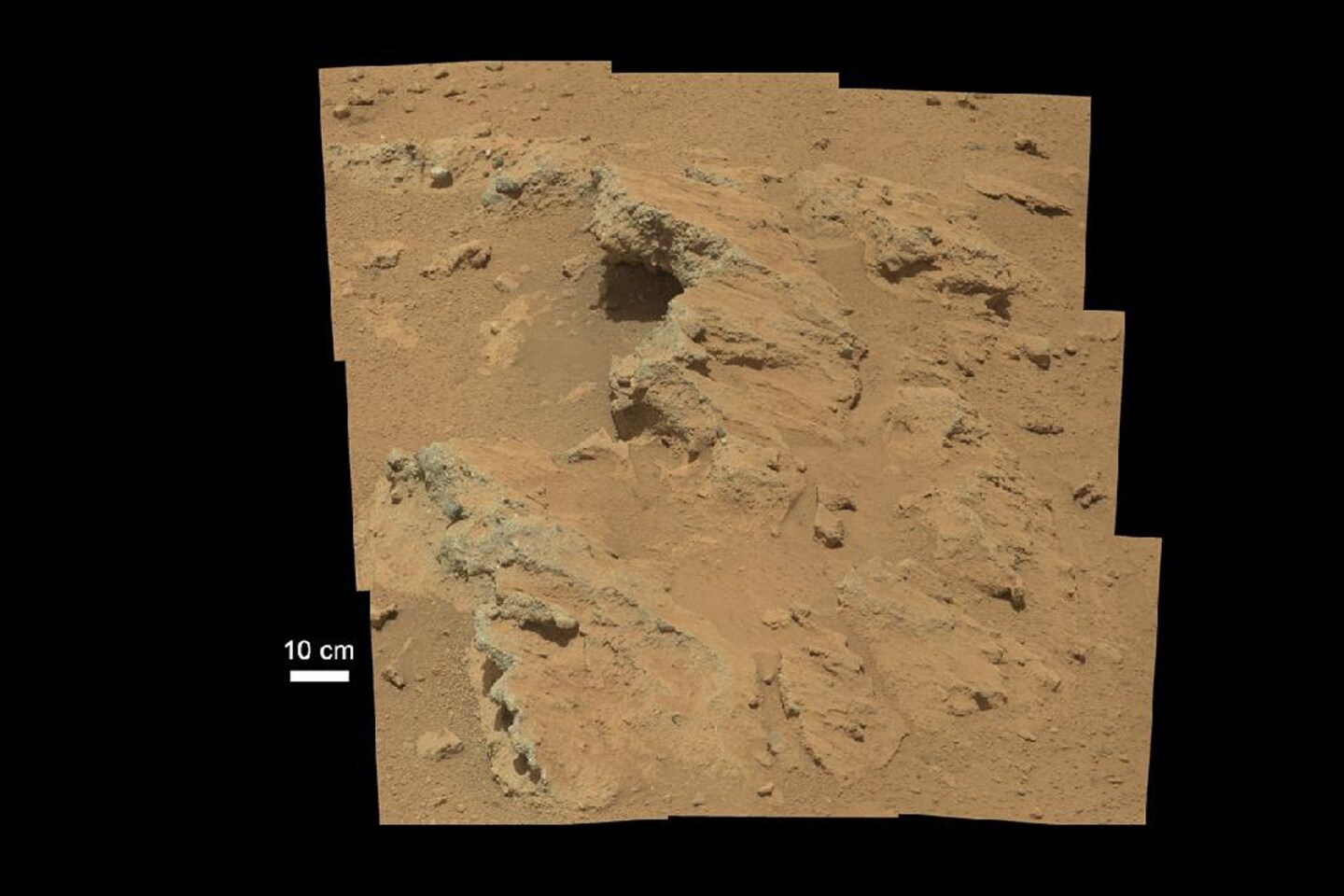
Curiosity’s main mission is to seek out areas where life may have once or could still exist. Therefore, the discovery in September of rocky outcroppings thrusting from the Martian surface that are the remains of an ancient stream bed consisting of water-worn gravel that was washed down from the rim of Gale Crater, was a major achievement. It meant that there was a time when Mars was once a much wetter place, and increases the chances that it once harbored life ... or still does.
On the other hand, Curiosity has also been sniffing the Martian air for traces of methane, a key indicator of life, but hasn't found any but the tiniest presences, so the balance sheet is still even at the moment.
First drilling

In February, Curiosity operated the first robotic drill on another planet. The rover’s ”mini drill” is capable of both rotation and percussive drilling and is a vital part of the nuclear-powered explorer’s mission. The intense UV radiation and highly reactive chemicals on the surface of Mars means that finding signs of life requires digging beneath the surface to the protected interior of rock formations.
The drilling is part of Curiosity’s sample collecting and testing system. Where previous probes were content with a bit of scooping and scraping, Curiosity backed up collecting loose soil with drilling inside of rocks, zapping them with lasers, getting up close with its Alpha Particle X-ray Spectrometer and processing soil and rock samples inside its onboard laboratory where they are analyzed using x-ray diffraction and a mass spectrometer.
Panoramic self portrait
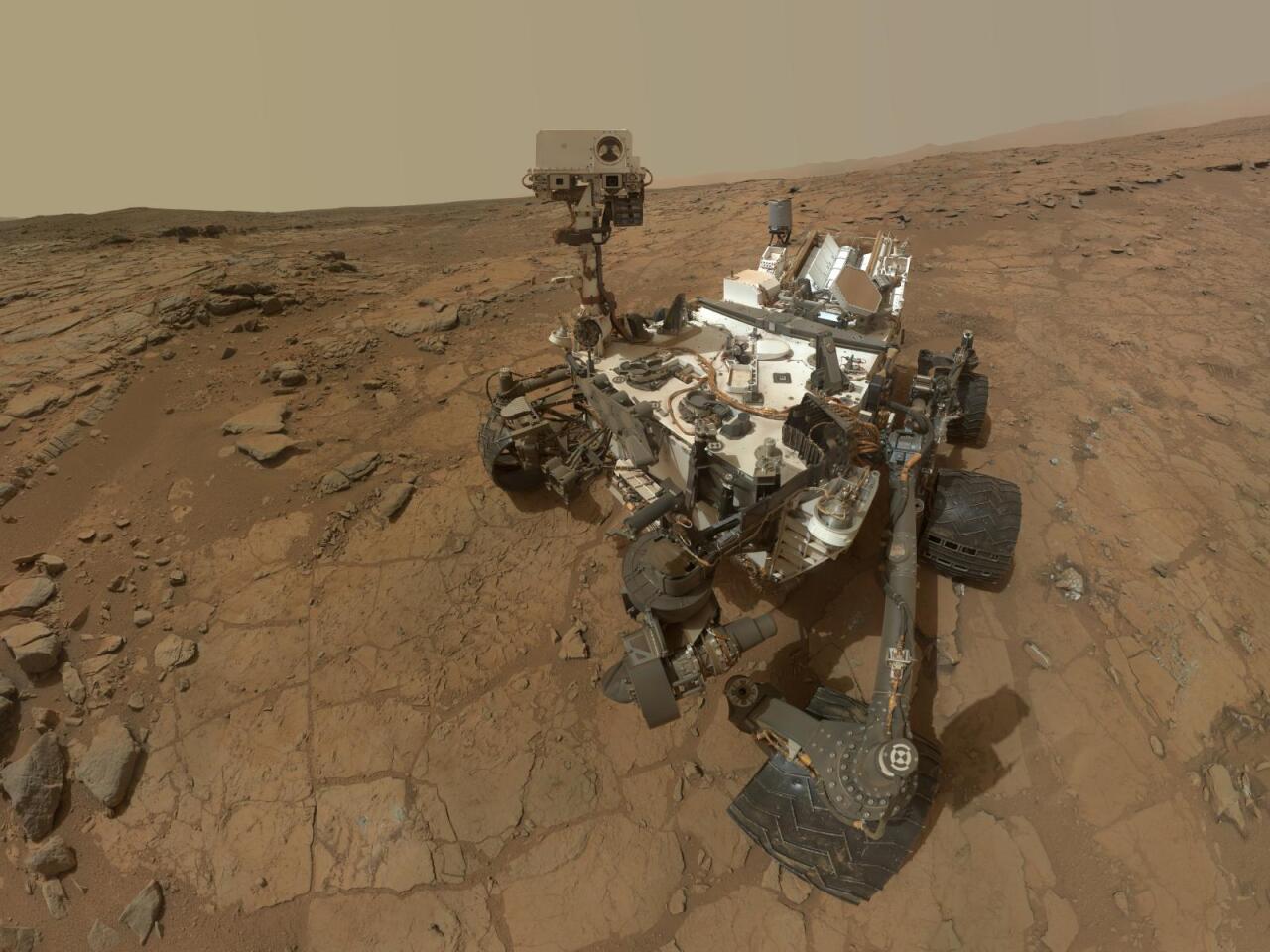
One thing that Curiosity is exceptionally good at is taking pictures. It has 17 cameras on board, ranging from the black and white navigation cameras to the high-resolution color imagers in the mast. In the first week of February, Curiosity used its Mars Hand Lens Imager to take 130 high-resolution images, which were assembled into a 360⁰ panorama that included a portrait of itself. Curiosity has sent back material for several panoramas, which are not only breathtakingly beautiful, but also provide scientists with a degree of clarity and context that it often lacking from images from unmanned probes. In addition, these self-portraits allow engineers to keep an eye on Curiosity’s physical condition.
So far, Curiosity has sent back 36,700 full-sized images and 35,000 thumbnail images.
Begins long trek
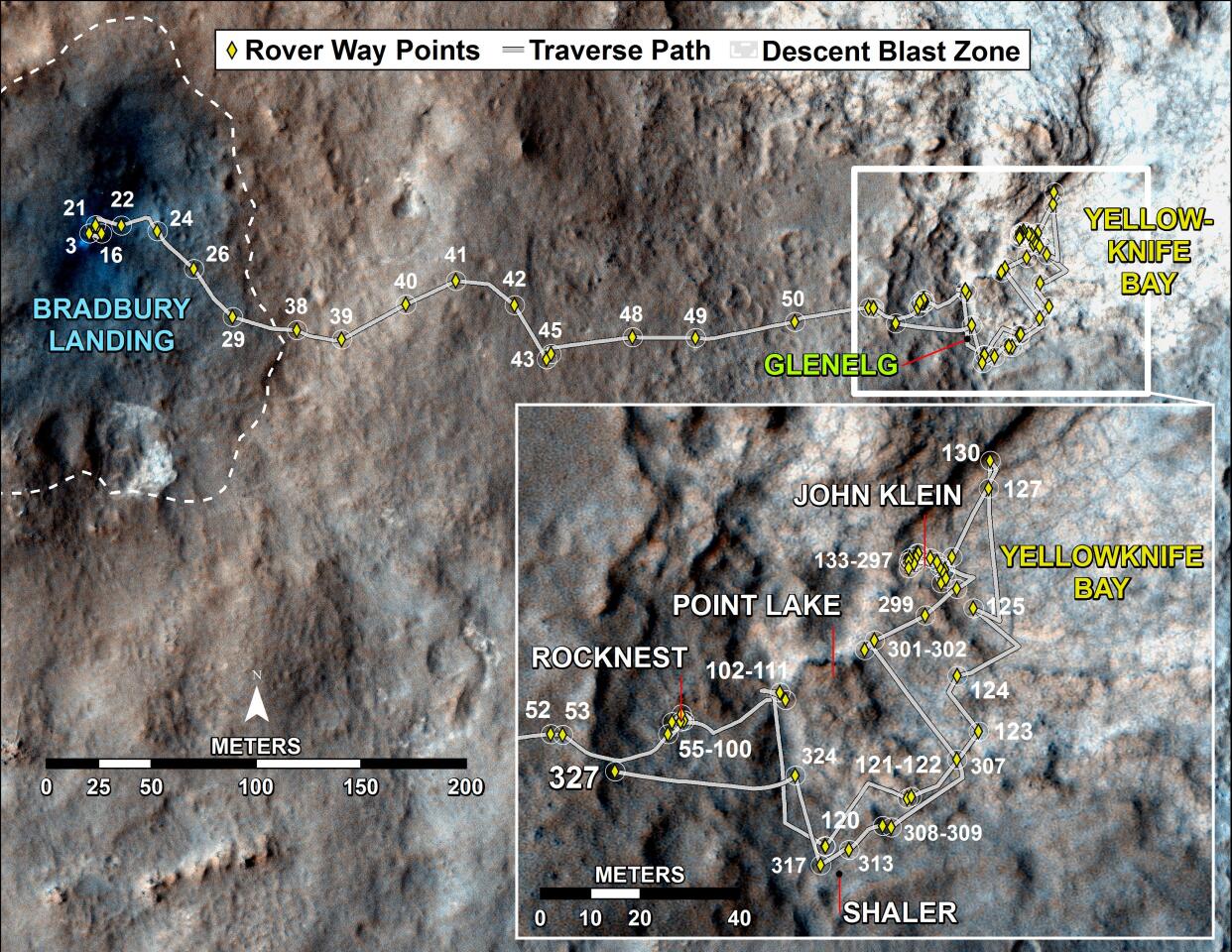
On July 4, the rover left the sedimentary outcrop called "Shaler" at Glenelg and began its journey, which will take nine months to a year. It’s headed for the lower reaches of Mount Sharp, about five miles (8 km) away, where scientists believe there are many exposed layers of rock that may hold evidence about ancient Mars and how its environment has changed over time. On July 17, Curiosity passed the one-kilometer mark from Bradbury Landing in its travels, and has now gone more than a mile.
This is a long way behind the Soviet Lunokhod 2 lunar rover, which landed on the Moon in 1973 and drove 37 km (23 mi) before conking out, but it’s early days. Officially, Curiosity’s mission ends next year, but NASA has a reputation for building landers that, if they survive touchdown, last longer than expected, so we’ll have to wait and see how far Curiosity will go.
The video below shows the first year of the Curiosity mission in time lapse.
Source: NASA



