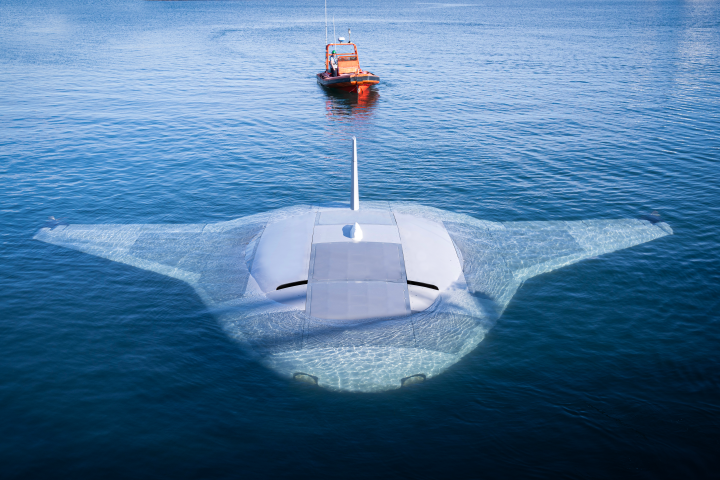
Autonomous underwater vehicles, better known as AUVs, are increasingly finding use in applications such as oceanographic research, mapping, military reconnaissance, and deep-sea oil-well maintenance. As these independent underwater robots make their way through the world's oceans, they use GPS transceivers to keep themselves on a predetermined route. When they encounter challenges such as cross-currents, one might assume that their best course of action would be simply to power straight across them, in order to travel the shortest distance possible. Engineers from MIT, however, have developed a system that allows AUVs to reach their destinations sooner, by traveling out of their way to "go with the flow."
The algorithm-based system, developed by MIT's Multidisciplinary Simulation, Estimation, and Assimilation Systems (MSEAS) group, is designed to work not just with individual AUVs, but even with swarms of vehicles following different routes. Besides allowing the subs to identify and follow currents that will get them where they're going more quickly, the system can also calculate oceanic paths optimized for minimum use of energy, or for maximum data collection opportunities.
Besides simply hitching rides with currents, the system may also instruct AUVs to dive under or rise over them. Additionally, it is able to steer them around forbidden "no subs" zones (such as marine ecological reserves), and can even compensate for moving obstacles such as passing ships. Should the unpredictable ocean not behave exactly as the algorithms predicted, the system is also able to identify the discrepancies, and get the AUVs back on course.
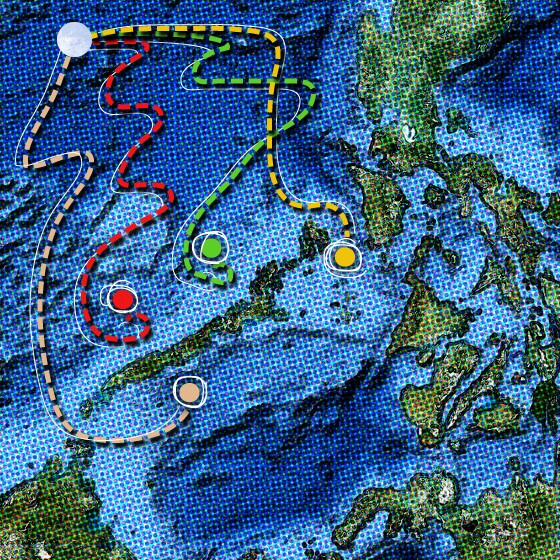
The MSEAS engineers have performed successful tests of the system using computer models, including one in which 1,000 AUVs made their way through a complex area of the Philippines. That area features intricate shorelines, numerous islands, shallows, and shifting currents. The virtual AUVs were launched from different ships, and were heading for different destinations.
Although other teams have tried to devise such systems in the past, study leader Pierre Lermusiaux stated that the algorithms employed were too imprecise, couldn't handle the chaotic real-world conditions in the ocean, or simply required too much computational power to be practical. He added that in the future, his group's system could also be applied to unmanned aerial vehicles, or even to nanobots traveling through the human bloodstream.
More information is available in the video below.
Source: MIT