






Nature has been the source of inspiration for a variety of different forms of robotic locomotion. Yet another example is the STAR, a 3D-printed robot modeled after an insect's ability to squeeze into even the tiniest spaces. Developed by students at UC Berkeley's Biomimetic Millisystems Lab the STAR, which stands for Sprawl Tuned Autonomous Robot, is able to flatten its legs down to slip under a small gap and then raise them up again to climb over larger obstacles.
With the exception of the electronics, each component of the STAR was built using a ProJet 3000 3D printer, meaning a full robot can be manufactured quickly and cheaply. The main core of the bot holds its control board and battery, which are connected to the six individual legs that propel it forward. Each of the legs has three spokes measuring 2.8 cm (1.1 in) with a 90-degree gap between them, which allow it to crawl over obstacles 4 cm (1.6 in) higher than if it just had wheels.
A brushed DC motor provides motion to each set of legs, while a 300 mA/hr LiPo 4V battery gives it enough power to run at full speed for 30 minutes on a single charge. Altogether, the tiny robot weighs just 73 g (2.6 oz).
What really sets the STAR apart from other robots, though, is its ability to adjust its sprawl angle (i.e. the angle between its body and legs) over a range of 150 degrees to adapt to different situations. Depending on the angle, the robot can move faster over different surfaces, climb over taller objects, or slip into narrow passageways, among other tasks.
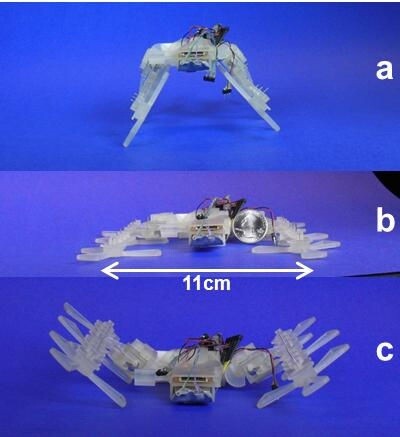
At a sprawl angle of zero degrees, the robot lays flat on the ground and has a height of just 2.5 cm (1 in), a length of only 12 cm (4.7 in) and a width of 11 cm (4.3 in). It can't actually move in this position, but by changing its sprawl just a few degrees, the robot's legs can touch the ground to move underneath an obstacle, such as a door, without gaining much height. At a 90-degree sprawl, the robot can fit through smaller vertical spaces and travel over rough terrain more easily.
Changing the sprawl also allows the bot to recover from a fall no matter how it lands, since it can maneuver its legs to flip itself over when needed. The robot can also reverse its direction just by raising its legs into a negative sprawl angle and touching the opposite sides to the ground.

The STAR's ability to limbo under doorways and scale obstacles would be impressive enough, but the research team found that changing the sprawl angle even affected its overall velocity. When running on a lower sprawl angle, the robot's body remained more stable and the legs contacted the ground with more force, giving it a slight speed boost.
On a smooth, flat surface, the STAR is capable of running along the ground at a speedy 5.2 m/s (approx. 11.6 mph), leaving its lab stablemate, the VelociRoACH, eating its dust. By only spinning one side of legs at maximum speed, the robot can also turn a full 360 degrees in under a second and take off in another direction almost instantly.
The team has already made three versions of the STAR and added slight improvements to the design with each new model. The latest iteration sports a handful of mechanical tweaks along with fiber-reinforced rods that should prevent damage when the robot crashes at high speeds.
You really have to see the STAR in action to understand just how maneuverable it is, so check out the video below to see it glide underneath short gaps and then quickly take off running while barely breaking stride.
Source: Biomimetic Millisystems Lab


