



Robot manipulators – or hands, as we like to call them – come in all shapes and sizes. Some, like those developed for Willow Garage's PR2, have just two fingers. Others have three, four, or five fingers – and some manage to lift objects with none at all. Now, an MIT spin-off called Robot Rebuilt is hitting up Boston venture capital firms to develop a manipulator with human-like sensitivity.
"I was inspired by the ridges humans have on their fingers. We wanted to make a robotic hand that would mimic that, and achieve some of the same sensitivity our hands have," says Eduardo Torres-Jara, who developed the robot hand at MIT's Computer Science and Artificial Intelligence Lab under the supervision of Rodney Brooks (founder of iRobot and Rethink Robotics). Torres-Java's company is working out a technology license with MIT, while he works as an assistant professor at Worcester Polytechnic Institute.
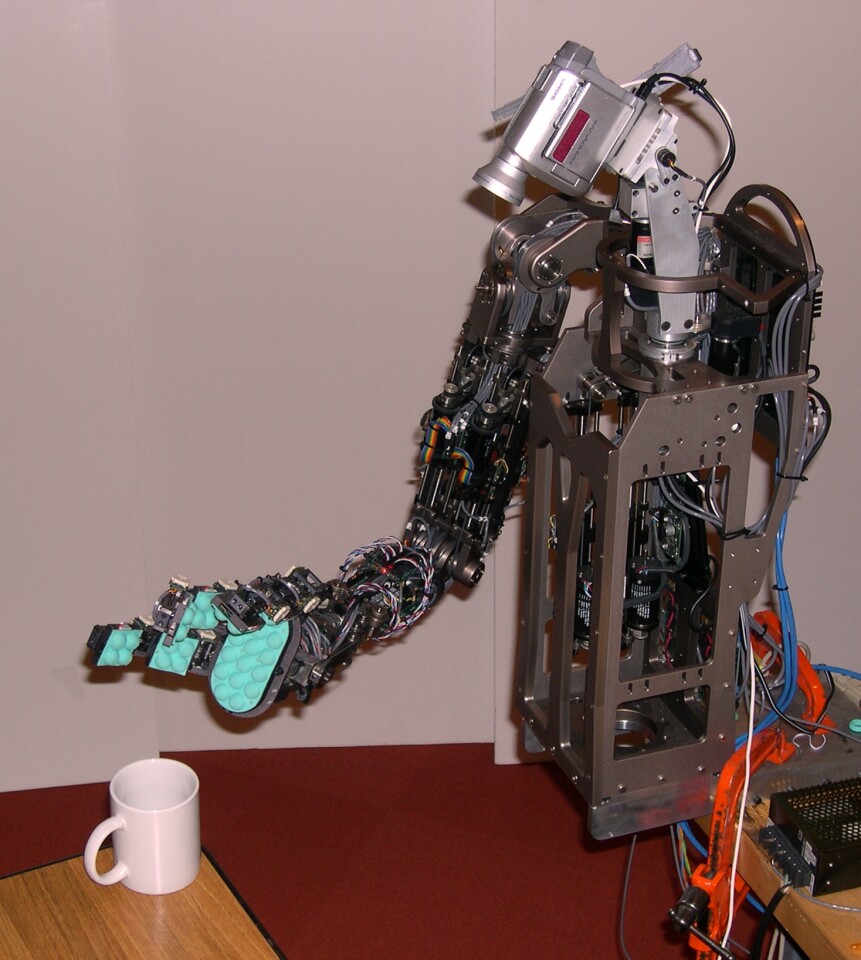
At MIT he built a robot called Obrero, which had a compliant hand with position and force control of its three fingers, allowing them to conform to an object's shape. Additionally, the fingers and palm contained eight force sensors, five position sensors, and seven high-resolution tactile sensors – the details of which have since been removed from Obrero's project page. However, Obrero is described as being "as much about perception as action and is intrinsically responsive to the properties of the object being manipulated; manipulation that does not rely on vision as the main sensor but as a complement."
Robot Rebuilt's new robot, Tactico, would continue where Obrero left off. "We're starting with the hand, but we're also working on building an arm," Torres-Java says in an interview with Boston.com. "Right now, PhDs come in at 3 AM to take care of their experiments," he adds, referencing the CNC-milled parts that must be removed from the machine's work area. "Our robot could do that." It would use a camera to detect objects around it, and would pick them up with enough strength to lift them without them slipping or breaking.
You can watch Obrero handling objects in the videos below.
Source: Robot Rebuilt via Boston.com


