









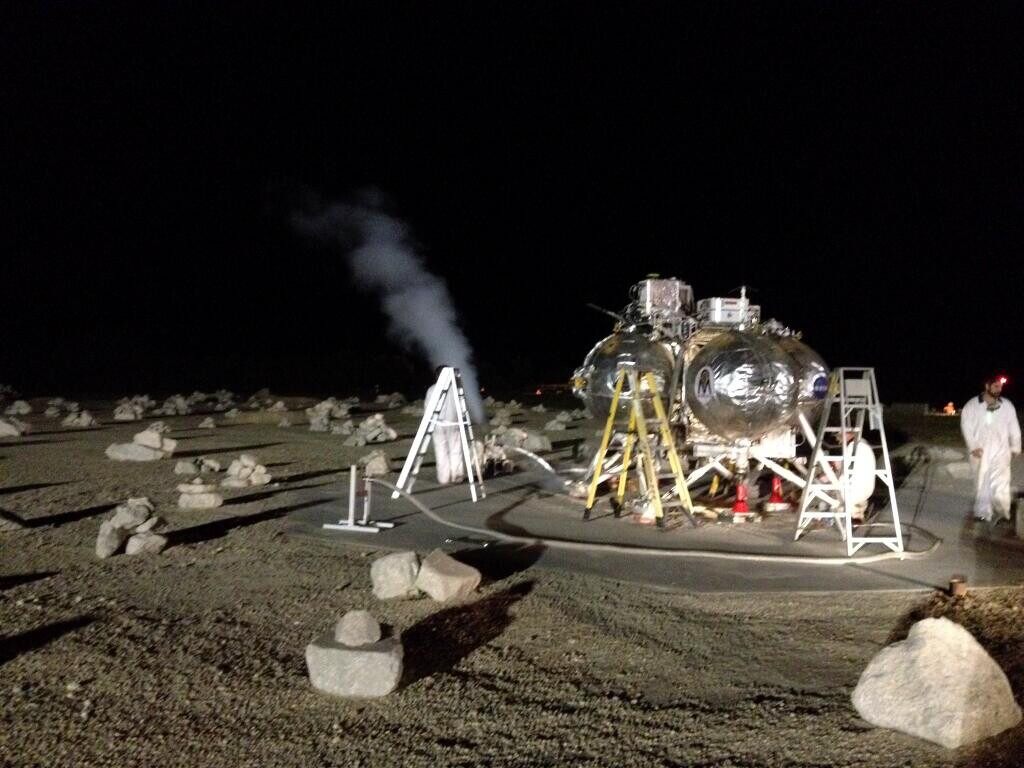
Spacecraft lifting off at night are a beautiful sight, but equally impressive is when one lands in the dark under its own power. NASA’s robotic Morpheus prototype planetary lander did both of those in its first night-time free flight at the Kennedy Space Center in Florida, which included an autonomous landing in an artificial lunar landscape.
Look at images of the Apollo Moon missions and you’ll notice a steady progression as Apollo 11 landed in a flat plain and later missions came down in more rugged terrain as the astronauts gained more experience. That paid off dividends when it came to exploration, but for unmanned landers the rule has always been to find the widest and flattest place to put down.
The problem is, the places that are the safest places to land aren’t always the most interesting. Even supposedly "safe" landing areas can be hazardous. Look, again, at Apollo 11, where Neil Armstrong had to abort the landing at the last second to avoid a boulder field ruining his day and pilot the Lunar Module down himself.
That’s one reason why rovers are so popular and why space scientists and engineers are trying to come up with robotic landers that can pull an Armstrong and take over the task of landing themselves, even in areas strewn with hazards.
Designed to carry a 1,100 lb (500 kg) payload, NASA’s Morpheus lander is not only built to take off and land under its own power, it also has an Autonomous Landing and Hazard Avoidance Technology (ALHAT) Hazard Detection System. For Morpheus, this involves three light detection and ranging (lidar) sensors that use flashes of light to create a 3D mosaic map of the terrain below it, allowing the computers to detect any hazards and avoid them. In this case, the hazards were a field of mock up craters and boulders.
It’s all part of a project to create a piloting and flight system for landing autonomously on other planets. The idea is that the lander is programmed with a "pre-mission landing aim point," which is where mission control would like to set down. Using its surface-tracking sensors, the lander precisely tracks its altitude and velocity while keeping an eye out for any obstacles on the ground. Using algorithms running on high-speed, high-volume processors, the lander sorts out where the nearest safe landing spot is to the aim point and lands on it automatically.

The night-time flight test took place at the Kennedy Space Center, where the unmanned craft took off and rose to 800 ft (244 m). The Hazard Detection System guided it in with the aid of a laser altimeter and Doppler lidar to track altitude and velocity. It then landed autonomously in the hazard-strewn zone a quarter of a mile (402 m) from the Center without banging into anything.
"The flash lidar performed very well, and we could clearly identify rocks as small as one foot (0.3 m) in size from the largest range that Morpheus could give us, which was approximately a quarter mile," says Eric Roback, ALHAT flash lidar lead engineer. "With this sensor we could even find the safest landing site in a pitch black crater."
In addition, Roback sees the technology as having a great potential for planetary exploration. "Once this technology goes into service, the days of having to land 20 or 30 miles (32 to 48 km) from where you really want to land for fear of the hazardous craters and rocks will be over," he said. "Then we can land near the truly interesting science and near the critical resources that will be needed for eventual colonization, and we can do it over and over again safely."
The video below shows the Morpheus test flight.
Source: NASA



