



Remote-controlled quadrotor robots have been around for some time, but in the following video just released by a research team at the University of Pennsylvania's General Robotics, Automation, Sensing and Perception (GRASP) Lab, science fiction edges much closer to science fact as a swarm of the Nano Quadrotors perform some astounding maneuvers.
Admittedly, use of the term "nano" may be stretching things a bit, but even so, the capable little robots provide an interesting glimpse into what the future may hold for surveillance, search and rescue, light construction and warfare.
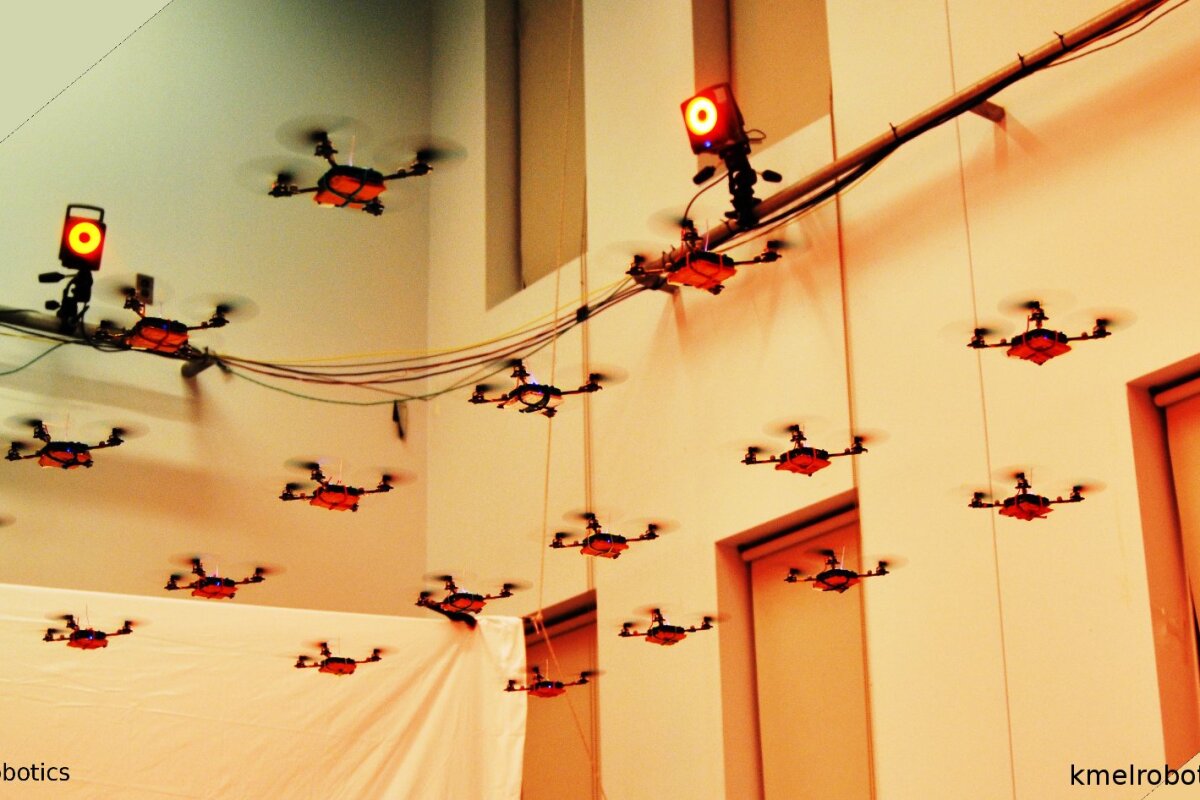
GRASP robotics researchers Alex Kushleyev, Daniel Mellinger and Vijay Kumar teamed up with developer KMel Robotics to program teams of up to twenty agile-flight-capable quadrotors to fly in various complex formations. As the video shows, the quad squadron can fly in linear arrays, navigate around obstacles and otherwise exhibit what the GRASP team dubs complex autonomous swarm behavior.

A European team recently demonstrated similar "swarm" capabilities by using quadrotors to build a 6 meter (19.7 ft) polystyrene tower.
Watch the GRASP video below to see how real-world development in this area is no longer just a flight of fancy.


