










The Defense Advanced Research Projects Agency has published concept artwork depicting the robots that will compete in its ambitious DARPA Robotics Challenge (DRC). The DRC will require robots to drive a car, travel through rubble, open doors, climb ladders, manipulate tools, and more. However, due to the current limitations in artificial intelligence, the robots will be teleoperated by a team of people behind the scenes. The idea is to advance robotics technology so that humans won't have to put their lives at risk in future disaster scenarios.
The winning team will be awarded US$2 million, but that's not all. Teams are divided into two groups (hardware and software) that will each get millions in funding through the end of 2014, when the DRC's final challenge takes place. The hardware groups have it really tough: they have to build and program their robots from scratch, so they'll get up to $4 million in funding.
The software groups don't exactly have it easy, but because they will be given a robot and simulator based on Boston Dynamics' Atlas, they only get funded up to $2.125 million. Of the original 18 teams, just eight have the chance make it to the final round of funding.
Here's a quick look at the competitors, with captions provided by DARPA.
Carnegie Mellon University – National Robotics Engineering Center
CMU-NREC proposed to develop the CHIMP (CMU Highly Intelligent Mobile Platform) robot for executing complex tasks in dangerous, degraded, human-engineered environments. CHIMP will have near-human form factor, work-envelope, strength and dexterity to work effectively in such environments, yet avoid the need for complex control by maintaining static rather than dynamic stability.
Drexel University

Drexel University’s design focuses on a mature, open-architecture, bipedal robot called Hubo. Each member on Drexel’s team will be equipped with a stock Hubo, a complete, full-sized humanoid. This infrastructure will catalyze a multi-university effort to “hit the ground running” and successfully address all anticipated DRC events in a “program-test-perfect” model.
Raytheon
Raytheon proposed to construct Guardian, a new, self-powered, lightweight, robust, dexterous humanoid robot that will build on the team’s experience with human-scale exoskeletons. The Guardian robot will expand its Exoskeleton (XOS) concept, introducing innovative technologies such as large range of motion, high specific torque/power actuators and a rapidly modulated fluid supply for overall power efficiency.
SCHAFT Inc.

SCHAFT Inc. proposed a bipedal robot based on mature hardware and software designed for its existing HRP-2 robot. SCHAFT will create an Intelligent Robot Kernel in which it will combine the necessary software modules for recognition, planning, motion generation, motion control and a user interface. The group will divide into three teams to execute the tasks: hardware design, software integration and scenario testing.
Virginia Tech
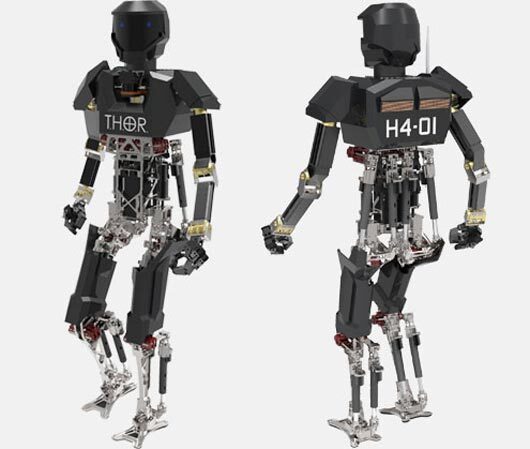
Virginia Tech proposed to develop THOR, a Tactical Hazardous Operations Robot, which will be state-of-the-art, light, agile and resilient with perception, planning and human interface technology that infers a human operator’s intent, allowing seamless, intuitive control across the autonomy spectrum. The team will emphasize three essential themes in developing THOR: hardware resilience, robust autonomy and intuitive operation.
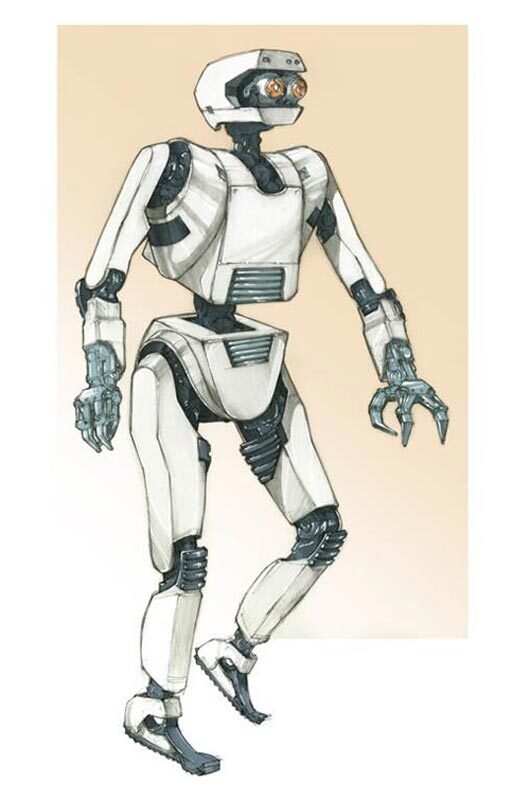
NASA - Johnson Space Center

NASA Johnson Space Center proposed to develop a next-generation humanoid robot and control paradigm capable of performing dynamic, dexterous and perception-intensive tasks in a variety of scenarios. NASA JSC’s development approach will apply successful practices that have been used to develop multiple generations of Robonaut and related technologies in collaboration with academic, commercial and other government partners.
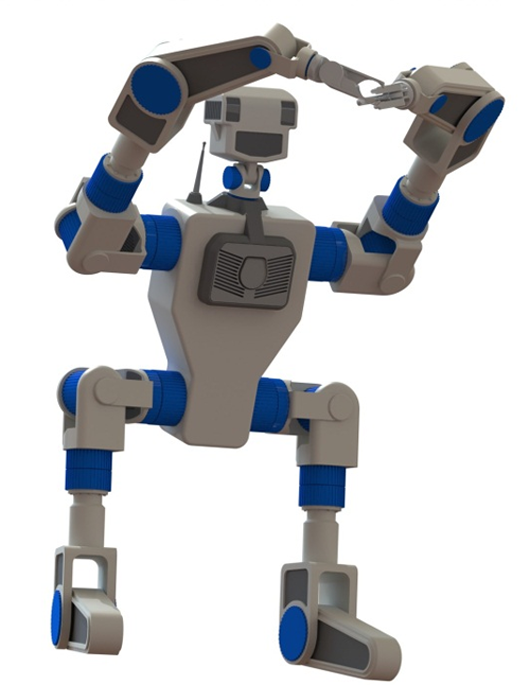
NASA - Jet Propulsion Laboratory (JPL)

NASA-JPL proposed to build RoboSimian, a simian-inspired, limbed robot that will use deliberate and stable operations to complete challenging tasks under supervised teleoperation. The team will employ design methods, system elements and software algorithms that have already been successfully demonstrated in JPL’s existing robots. RoboSimian will use its four general-purpose limbs and hands, capable of both mobility and manipulation, to achieve passively stable stances, create multi-point anchored connections to supports such as ladders, railings and stair treads, and brace itself during forceful manipulation operations.
The first major test will come in the middle of 2013, when teams will be put through a virtual disaster response challenge. This will be done in software simulations only, as a precursor to the first live challenge at the end of next year. Then, at the end of 2014 they will have a second (and final) live challenge which will determine the winner. Needless to say, this should all prove very exciting to watch as it unfolds over the next couple of years.
For the time being, you can watch Boston Dynamics' Pet-Proto (a prototype of the Atlas robot) overcoming some difficult terrain in the video below.
Source: DARPA DRC and DARPA via IEEE Spectrum


