












Several snake-like robots have been developed around the world, and while we keep hearing about their potential applications few have managed to slither outside of their research labs. Earlier this year Carnegie Mellon University's Biorobotics Lab put its modular snake robot's practicality to the test in an abandoned nuclear power plant, where it provided clear, well-lit images from the inside of pipes.
Austria's Zwentendorf nuclear power plant is the perfect testing ground for inspection robots. The plant was built in the 1970s but was never turned on, so there's no radiation to worry about. That makes it the next best thing to an operational plant, with a multitude of tricky pipes to explore.
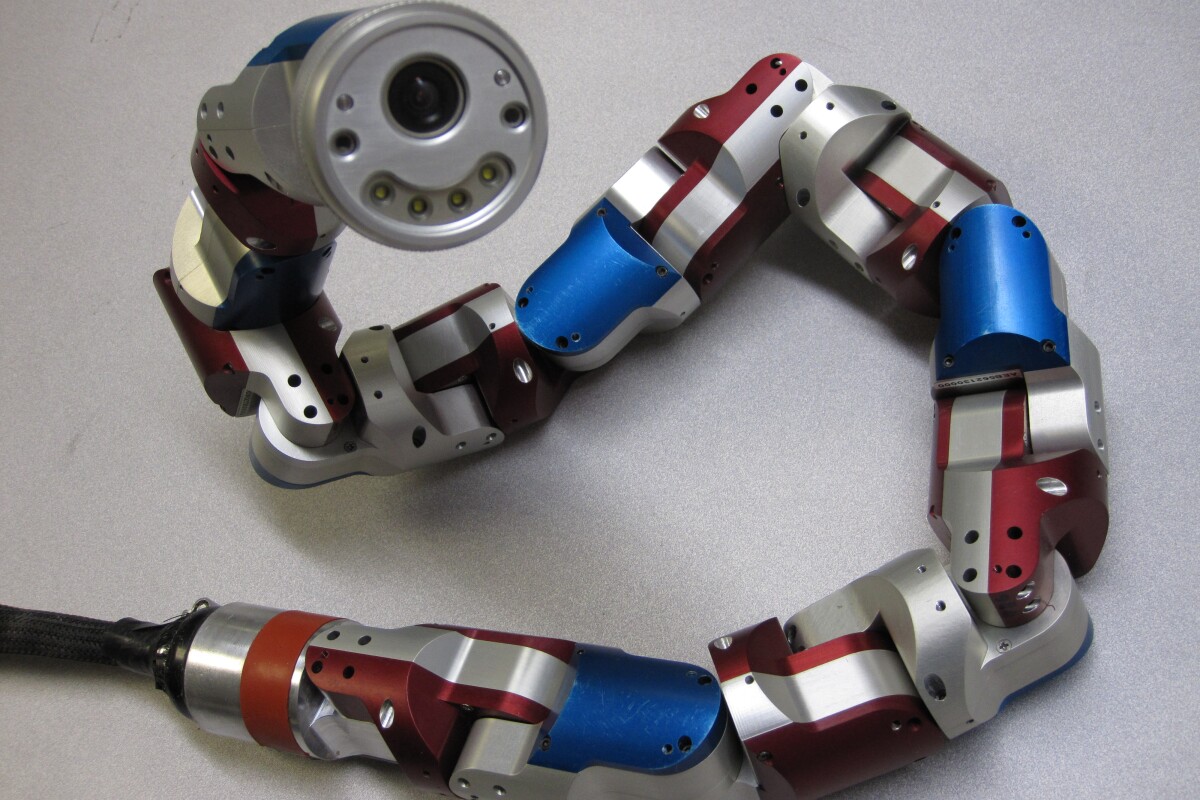
Recently, several robots have been developed to help explore the Fukushima Daiichi nuclear plant, which was damaged in the 2011 earthquake and tsunami. However, most plants contain miles of pipes, which other robots can't adequately inspect. The snake robot, which has a camera and LEDs on its head, crawled into 15 cm (6 in) wide steam pipes, providing operators with a clear view of what was inside. The robot moves by rolling itself in a corkscrew pattern, so the resulting video feed is automatically corrected in software to align with gravity.

"Our robot can go places people can’t, particularly in areas of power plants that are radioactively contaminated," explains Robotics Professor Howie Choset. "It can go up and around multiple bends, something you can’t do with a conventional borescope, a flexible tube that can only be pushed through a pipe like a wet noodle."
The robot, which is just 2 in (5 cm) in diameter and 37 in (97 cm) long, has 16 joints allowing it to move a bit like a snake. The body can twist around a cylindrical shape, such a leg, to climb up and down. The only problem is it's tethered by a power and control cable. In this experiment the team was hesitant to explore much beyond 18 meters (60 ft), but it could go much further.
Already the robot has investigated rubble in mock search-and-rescue missions, and in the future the team plans to make it water-proof. Another possible enhancement would allow the snake to map a nuclear plant's pipe network as it explores it.
You can see how the robot works, including what the operators see, in the following video.
Source: CMU Biorobotics Lab


